
首页 论坛 原厂专区 TRINAMIC嵌入式运动控制 STM32F0+TMC5130步进驱动参考原理图/PCB图/教程/源码等开源分享

-

- 0000000000000000
-
1888 发帖7917 回复34980 积分
- 私信他 + 关注


基于Stm32F0+TMC5130 Arduino接口42/57步进电机驱动参考原理图/PCB图/教程/源码等开源分享
技术群:171897584
资料下载见附件,电脑登入
参考视频链接:http://club.digiic.com/Video/VideoDetail/37362417-24b5-4d72-bc50-840fc582a1e0


一、概述
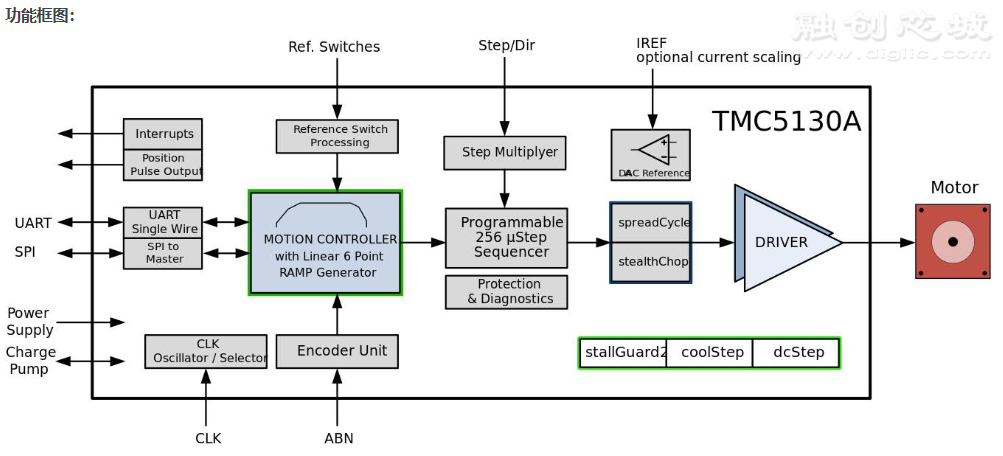
TMC5130芯片是一款集成式步进电机驱动器和运动控制器(定位控制)解决方案,适用于医疗、3D打印机、云台或其它自动化设备对性能有较高的场合应用和静音控制。该芯片具有集成的SixPoint斜坡控制器,微步进分度器,无传感器失速检测技术StallGuard2和完全无噪声的电流控制模式StealthChop,旨在驱动双极步进电机。 输出驱动器模块由低RDSon N沟道功率MOSFET组成,配置为全H桥,以驱动电机绕组。 TMC5130能够从每个输出驱动高达2.5A的电流(具有适当的散热)。TMC5130的供电电压为5-46V。 该器件提供SPI接口,用于配置和诊断以及步进和方向接口。
参数及特点:
2A电流(2.5A峰值),电压范围4.75-46VDC,9x9mm2 TQFP48封装
具有sixPoint斜坡的运动控制器
SPI和单线UART和Step / Dir接口,编码器接口和2x参考开关输入
每个完整步骤的最高分辨率256微步
stealthChop用于极其安静的操作和平稳的运动
spreadCycle高动态电机控制斩波器
dcStep负载相关的速度控制
stallGuard2高精度无传感器电机负载检测
coolStep电流控制,节能高达75%
集成电流检测选项,被动制动和续流模式,全面保护和诊断
 回复
回复
 举报
举报
-
- 0000000000000000
-
1888 发帖7917 回复34980 积分
- 私信他 +关注
-
- 0000000000000000
-
1888 发帖7917 回复34980 积分
- 私信他 +关注
-
- 0000000000000000
-
1888 发帖7917 回复34980 积分
- 私信他 +关注
 楼主
|
回复于 2020-03-24
3#
楼主
|
回复于 2020-03-24
3#
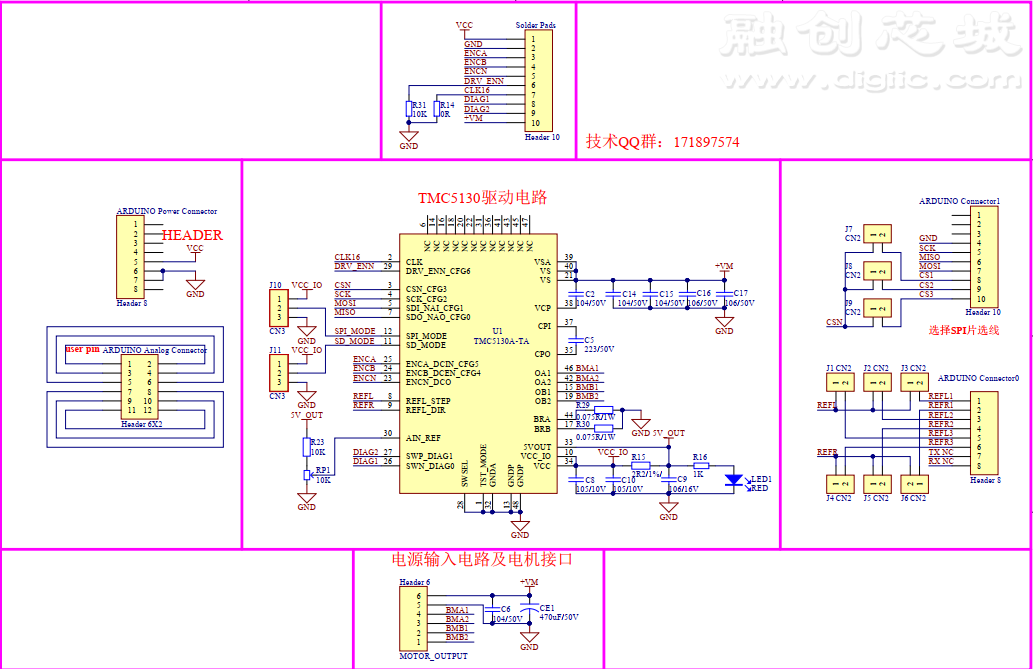
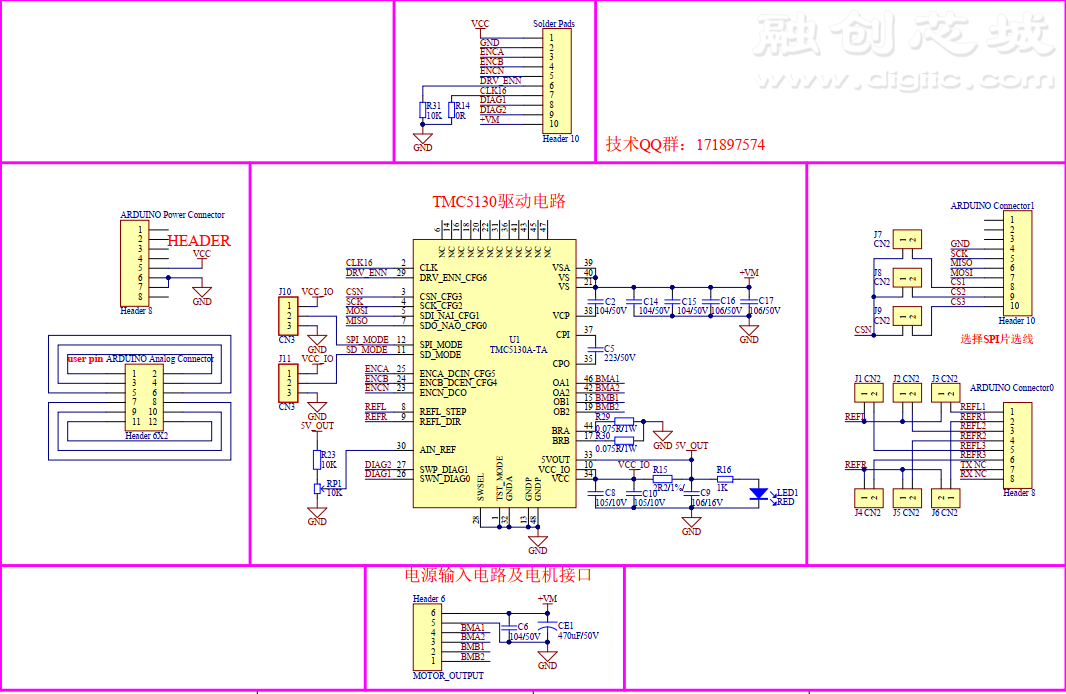
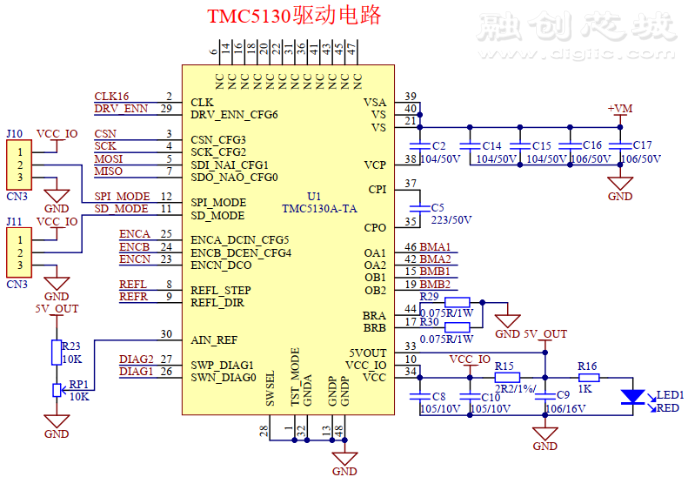
补充说明:
SPI_MODE、SD_MODE:对应的J10、J11通过跳线帽选择高、低电平选择不同模式
VCC、VCC_IO电源:使用芯片内部5V输出电源,如果有外部5V电源可选择外部的,可降低芯片的发热和功耗;
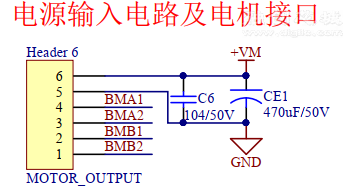
电源及接电机接口部分如下图:
-
- 0000000000000000
-
1888 发帖7917 回复34980 积分
- 私信他 +关注
楼主
|
回复于 2020-03-24
4#
补充说明:
母线电容CE1选择:一般是1A对应100uF左右(有条件的尽可能大);
电源保护:有条件的最好加防反接、TVS保护、以及保险丝等;
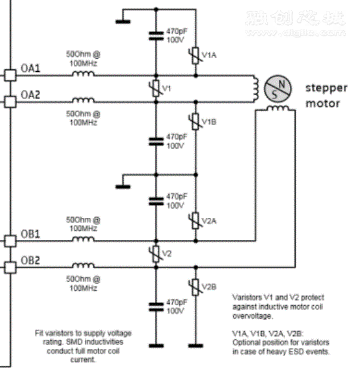
电机接口:如果对EMC要求较高的,最好加些滤波和保护,参考电路如下图:
-
- 0000000000000000
-
1888 发帖7917 回复34980 积分
- 私信他 +关注
楼主
|
回复于 2020-03-24
5#
ArduinO Power接口
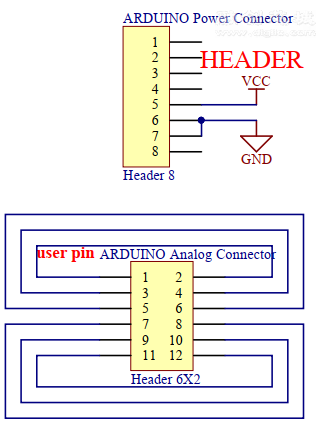
补充说明:共地及端口引出,5V电源未用到;
Header 10接口:
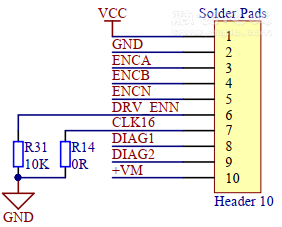
补充说明:
CLK16:接地,选用内部时钟;
DRV_ENN:使能输入接低电平,接的10K下拉可连接到MCU的IO口进行控制是否关闭电机接口电源;
脉冲+方向接口
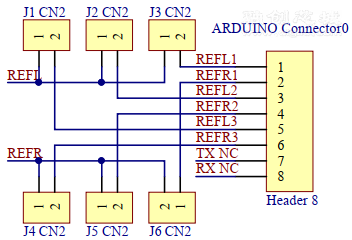
补充说明:
脉冲加方向接口选择不同的MCU引脚(SPI+SD:为脉冲+方向控制模式才有效);
-
- 0000000000000000
-
1888 发帖7917 回复34980 积分
- 私信他 +关注
楼主
|
回复于 2020-03-24
6#
SPI接口:
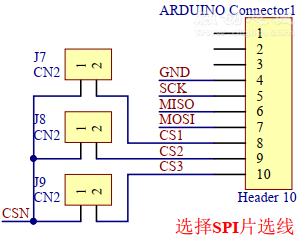
补充说明:
CSN:为SPI接口选择不同的MCU引脚(SPI+SD:为SPI模式有效);
SPI接口:SPI+SD:为SPI模式有效;
CFG细分设置接口:SPI+SD:为脉冲+方向控制模式才有效;
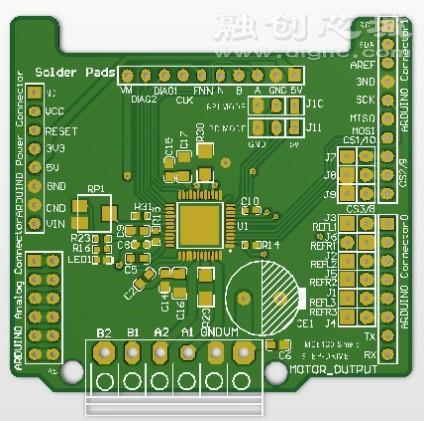
PCB图参考如下(最好是4层板):
-
- 0000000000000000
-
1888 发帖7917 回复34980 积分
- 私信他 +关注
楼主
|
回复于 2020-03-24
7#
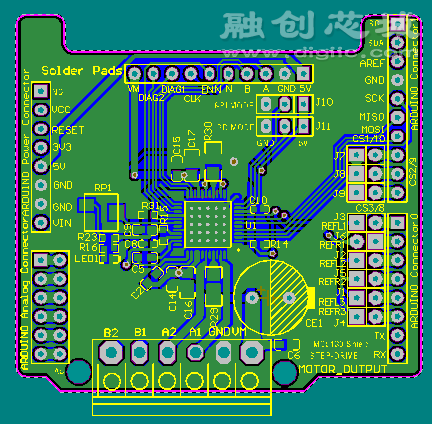
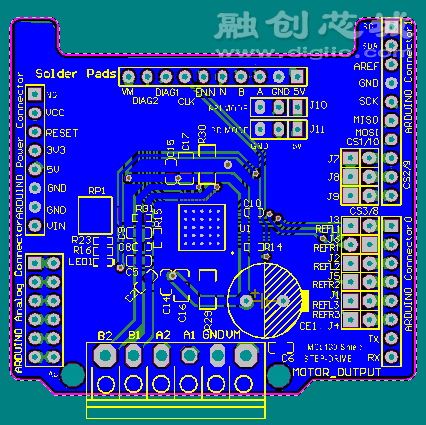
补充说明:
芯片底部最好不要走其它线,保证地平面完整及散热;
电流取样电阻:5130不需要,5160外部MOS,要差分采样(开尔文接法);
3D显示效果:
-
- 0000000000000000
-
1888 发帖7917 回复34980 积分
- 私信他 +关注
楼主
|
回复于 2020-03-24
8#
三、软件说明
1、SPI接口速度模式
芯片引脚跳线连接:
SPI_MODE:接高电平(VCC_IO)
SD_MODE: 接低电平(GND)
J7:短接
CSN:PB6
SCK:PA5
SDI:MOSI-PA7
SDO:MISO-PA6
-
- 0000000000000000
-
1888 发帖7917 回复34980 积分
- 私信他 +关注
楼主
|
回复于 2020-03-24
9#
初始化程序如下参考:
//TMC5130 SET
sendData(0xEC,0x000100C3);
//CHOPCONF: TOFF=3, HSTRT=4, HEND=1, TBL=2, CHM=0 (spreadcycle)
sendData(0x90,0x00011601);
//PAGE33:IHOLD_IRUN: IHOLD=10, IRUN=22(31 max.current), IHOLDDELAY=1
sendData(0x91,0x0000000A);
//PAGE33:TPOWERDOWN=10:电机静止到电流减小之间的延时
sendData(0x80,0x00000004);
//PAGE27:EN_PWM_MODE=1,使能
sendData(0x93,0x000001F4);
//PAGE33:TPWM_THRS=500,对应切换速度35000=ca.30RPM
sendData(0xF0,0x000401C8);
//PAGE43:PWMCONF
sendData(0xA4,1000);
//A1=1000第一阶段加速度
sendData(0xA5,50000);
//V1=50000加速度阀值速度V1
sendData(0xA6,5000);
//AMAX=5000大于V1的加速度
sendData(0xA7,200000);
//VMAX=200000
sendData(0xA8,700);
//DMAX=700大于V1的减速度
sendData(0xAA,1400);
//D1=1400小于V1的减速度
sendData(0xAB,10);
//VSTOP=10停止速度,接近于0-
- 0000000000000000
-
1888 发帖7917 回复34980 积分
- 私信他 +关注
楼主
|
回复于 2020-03-24
10#
2、SPI接口位置控制模式
芯片引脚跳线连接:
SPI_MODE:接高电平(VCC_IO)
SD_MODE: 接低电平(GND)
J7:短接
CSN:PB6
SCK:PA5
SDI:MOSI-PA7
SDO:MISO-PA6

块
导
航
举报
请选择举报类别
- 广告垃圾
- 违规内容
- 恶意灌水
- 重复发帖
