
首页 论坛 嵌入式软件专区 OPENMV OPEN CV 小米扫地机器人拆解(更新激光雷达资料部分(10-4更新激光雷达拆解图资料)

-

- 0000000000000000
-
1888 发帖7917 回复34980 积分
- 私信他 + 关注




 回复
回复
 举报
举报
-
- 0000000000000000
-
1888 发帖7917 回复34980 积分
- 私信他 +关注
 楼主
|
回复于 2017-11-02
沙发
楼主
|
回复于 2017-11-02
沙发
悬崖传感器,机器人底部一共有4个悬崖传感器。可有效杜绝机器人跌落损坏。


左右两只轮子,每个轮子都是独立电机驱动并且安装有里程计,用来计算工作室的行走里程。

轮子采用浮动式设计。
-
- 0000000000000000
-
1888 发帖7917 回复34980 积分
- 私信他 +关注
楼主
|
回复于 2017-11-02
2#

LDS激光测距传感器,会以5x360。/秒的速度扫描房间,获取距离信息。当激光投射到障碍物上时,会反射在图像传感器上。同时,图像传感器会根据光斑的像素序号来计算到激光测距传感器的中心距离。
此外激光测距传感器通过扫描并定位充电座,识别它在地图上的位置。当房间全部清扫完成,会自动规划最短路线返回充电座充电。
在清扫途中,如果电量低于20%,能自动返回充电座充电,当电量充至80%后机器人还会回到上次未清扫完成地点继续清扫,免去重复清扫的尴尬。

超声传感器,整颗传感器由负责发射超声和负责接收超声两部分组成,声波在空气中传播的速度是340M/s,根据发射和接收的时间差可以计算并得到机器人与障碍物距离,从而避免碰撞,透明物体(例如玻璃)也能正确感应提前减速。
机身上的充电触点。

位于机器人侧面的沿墙传感器。
-
- 0000000000000000
-
1888 发帖7917 回复34980 积分
- 私信他 +关注
楼主
|
回复于 2017-11-02
3#

机器人的边刷,仔细看中央半球形底部边缘的黑色小刷头为边刷防缠绕结构,又称“毛发隔离束”,它可以随边刷进行同步转动,一方面防止毛发进入间隙,另一方面便于收集毛发。

机器人尾部一个非常隐蔽的部位预留了一个MicroUSB接口,功能未知。

LG/松下原装进口高能量密度18650锂离子电芯,容量为5200mAh,标准模式下单次最大续航时间约2.5小时最大清扫面积约250平米。
-
- 0000000000000000
-
1888 发帖7917 回复34980 积分
- 私信他 +关注


-
- 0000000000000000
-
1888 发帖7917 回复34980 积分
- 私信他 +关注
楼主
|
回复于 2017-11-02
5#


经过漫长的拧螺丝,终于去下盖板,露出机器人的核心电路板。

电路板上密密麻麻布满了大大小小各种IC元件,复杂度异常!

另一侧是风机和各个模块部分连接插座。

各个模块部分连接插座。

充电触点这里没什么机关,就是简单的正负极连接线。
-
- 0000000000000000
-
1888 发帖7917 回复34980 积分
- 私信他 +关注



-
- 0000000000000000
-
1888 发帖7917 回复34980 积分
- 私信他 +关注
楼主
|
回复于 2017-11-02
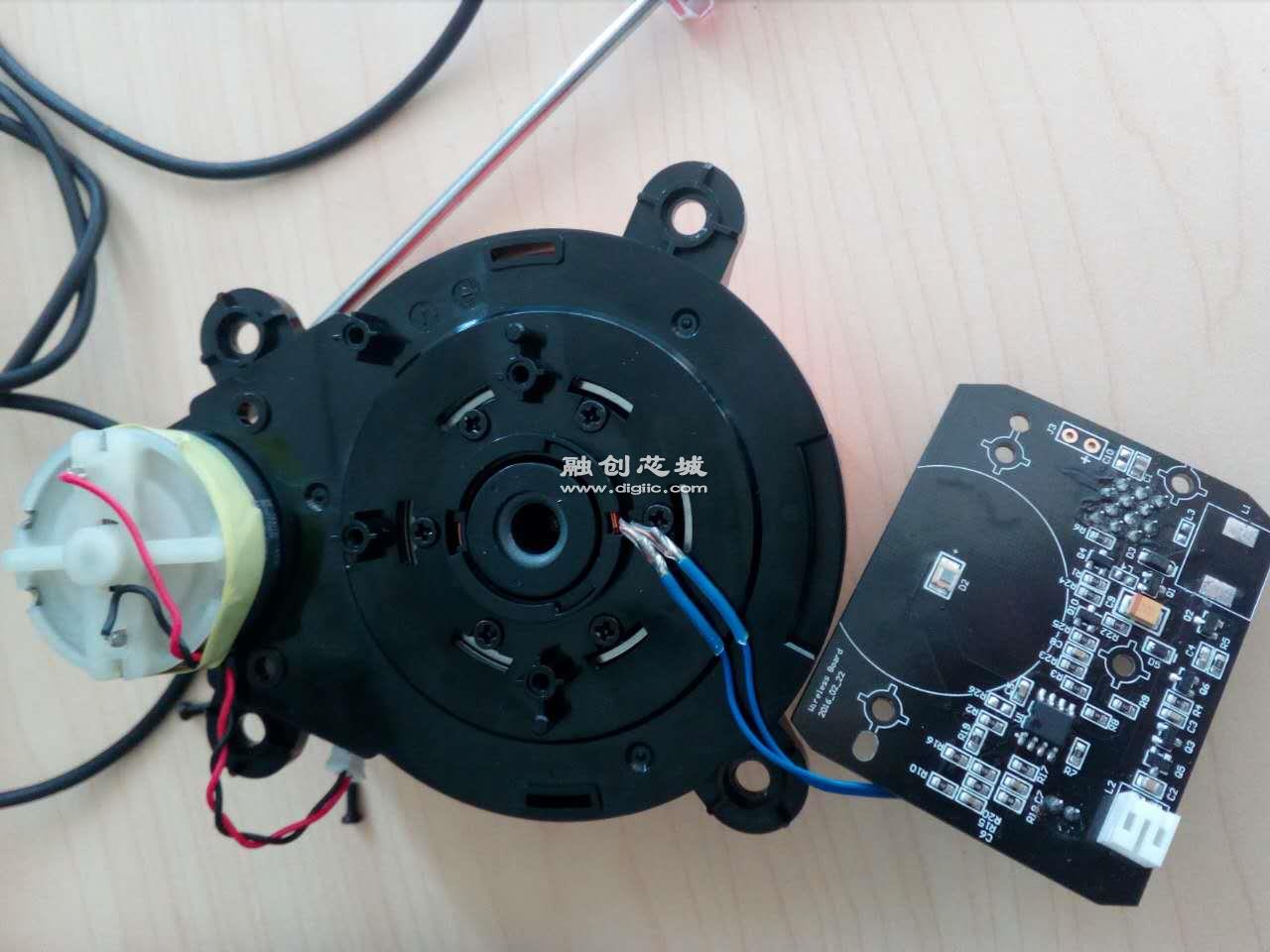
7#

超声雷达传感器,整颗传感器由负责发射超声和负责接收超声两部分组成。

拆掉螺丝和排线取下电机。

米家扫地机器人采用日本原装进口NIDEC无刷电机,能达到最大风量0.67m3/min,最大风压约为1800Pa。
-
- 0000000000000000
-
1888 发帖7917 回复34980 积分
- 私信他 +关注




-
- 0000000000000000
-
1888 发帖7917 回复34980 积分
- 私信他 +关注
楼主
|
回复于 2017-11-02
9#

接下来拆除LDS激光测距传感器

LDS激光测距传感器由一个电机通过皮带驱动。通过快速旋转以5?60?/秒的速度扫描房间,获取距离信息。
-
- 0000000000000000
-
1888 发帖7917 回复34980 积分
- 私信他 +关注
楼主
|
回复于 2017-11-02
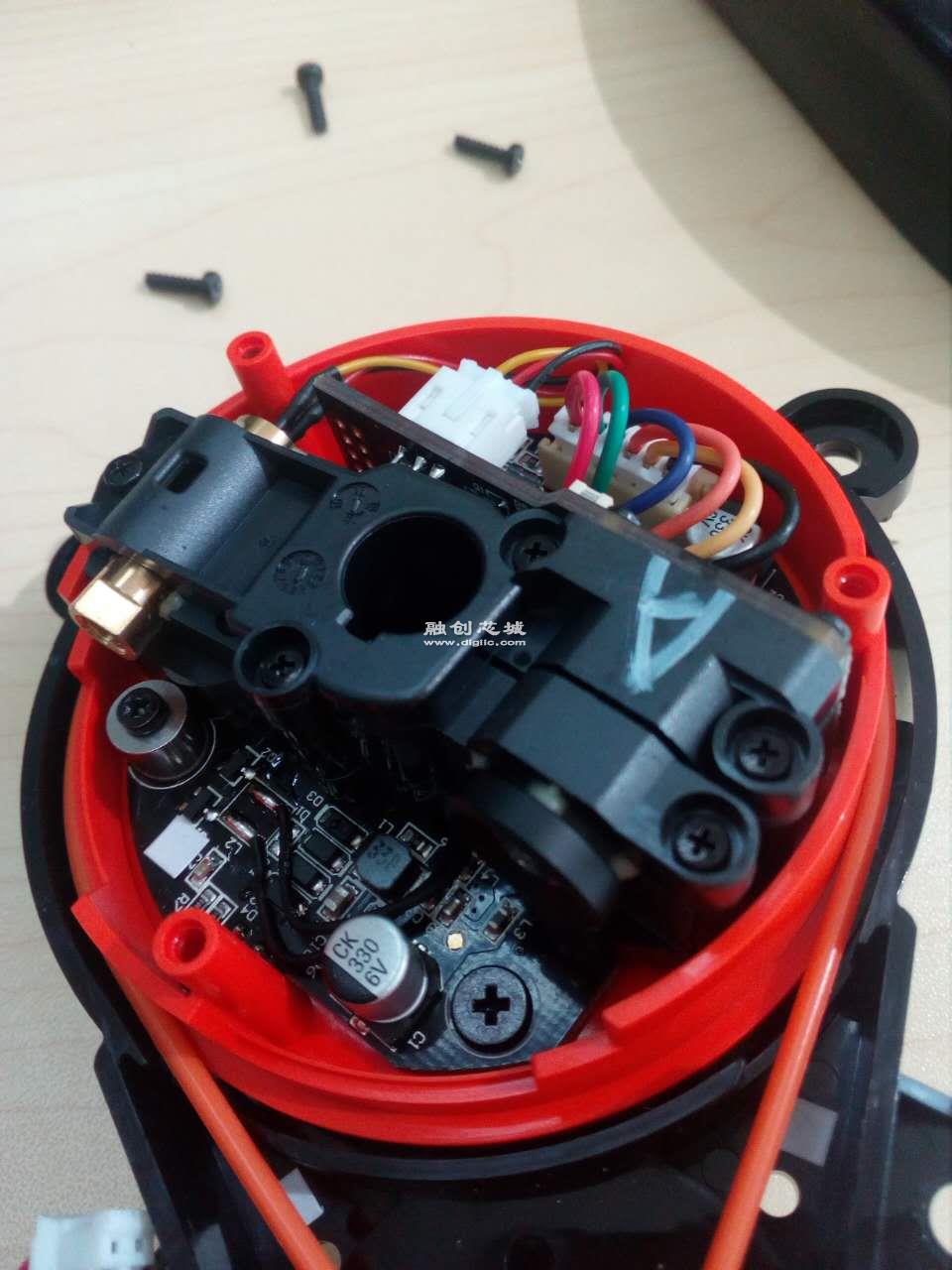
10#

拆开LDS激光测距传感器。里面有主控电路、激光发射管与接收传感器组成。

TI德州仪器TMS320F28026DAS微控制器(MCU)。

在激光测距模块下方还有一个光电传感器,孔里看到的是发射端。

接收端在底部的PCB上。


LDS激光测距传感器电路板反正面。

块
导
航
举报
请选择举报类别
- 广告垃圾
- 违规内容
- 恶意灌水
- 重复发帖
