
首页 论坛 嵌入式软件专区 OPENMV OPEN CV 【激光雷达应用专题】TFmini激光雷达是如何提高机器人的平衡性和防跌落的




 楼主
楼主
停车场如何能鉴定有没车,平衡机器人为何能看到楼梯,无人机为什么永远撞不到墙,道闸又是怎么避免砸到车或人的。这一切的背后,又是什么原因,激光雷达又起来那些作用,有哪些应用实例?敬请关注北醒激光雷达应用专题,让我们一起看看机器人眼睛的世界。
本期专题——TFmini激光雷达在自平衡机器人的应用示例。
1、应用场景介绍
机器人在移动行进的过程中,可能会遇到路面有向下的台阶或者地面凹陷等情况。如果没有相应的探测和处理措施,机器人就会有跌落的风险。

TFmini激光雷达作为测距传感器,拥有娇小的身材和较高的精度,可以用做机器人的防跌落传感器,实时探测前方位置距离信息并进行判断,使机器人及时做出例如刹车、减速、转弯等防跌落反应。
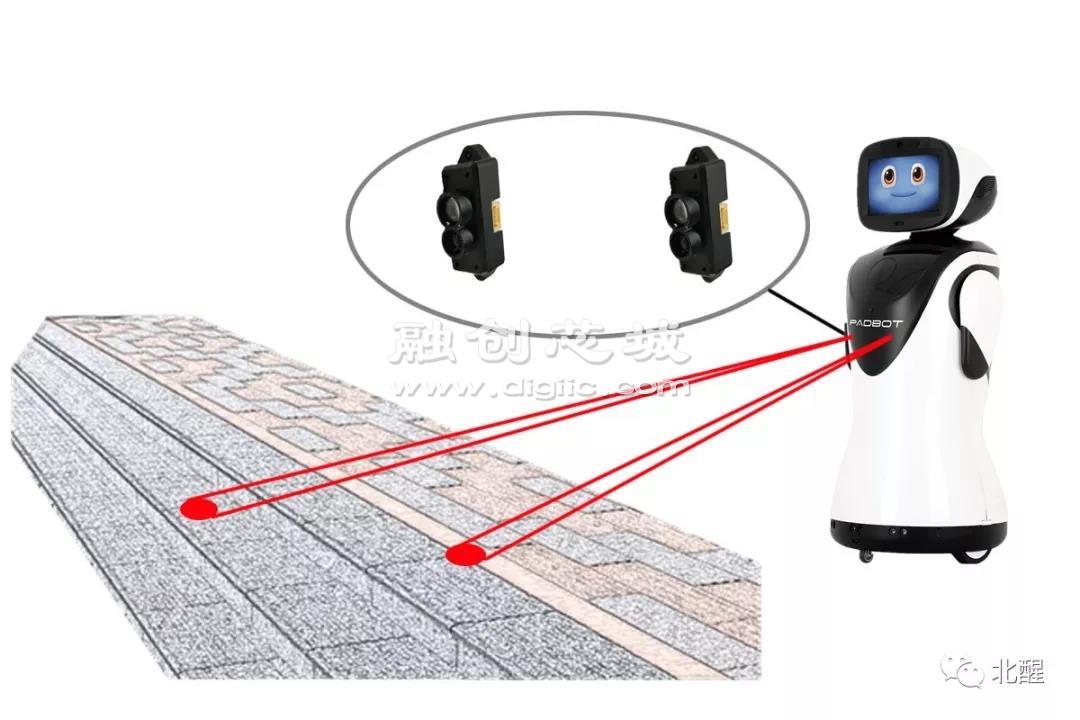
应用场景示意图
2、应用原理
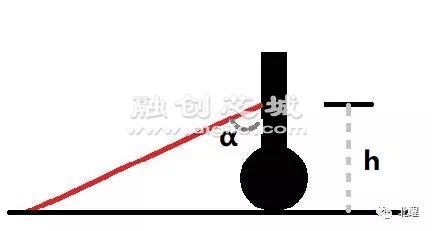
机器人在行进过程中,安装于机器人上的TFmini激光雷达以一定角度实时向斜下方测距。当路面较平坦时,这个距离值应该在一定的范围内;当路边有向下台阶或者凹陷时,这个距离值会超出合理范围,发生距离突变。结合机器人自身的姿态数据、速度数据以及TFmini激光雷达的安装位置等数据,依据相应的算法判断前方是否存在向下台阶或者凹陷,从而控制机器人做出防跌落响应动作。
道路较平坦时,测距距离在A1到A2范围内,并且距离变化较为连续;前方有阶梯或者凹陷时,测距距离值会有明显跳变,相同姿态下数值变大,(B>A,B1>A1,B2>A2)如下图所示:
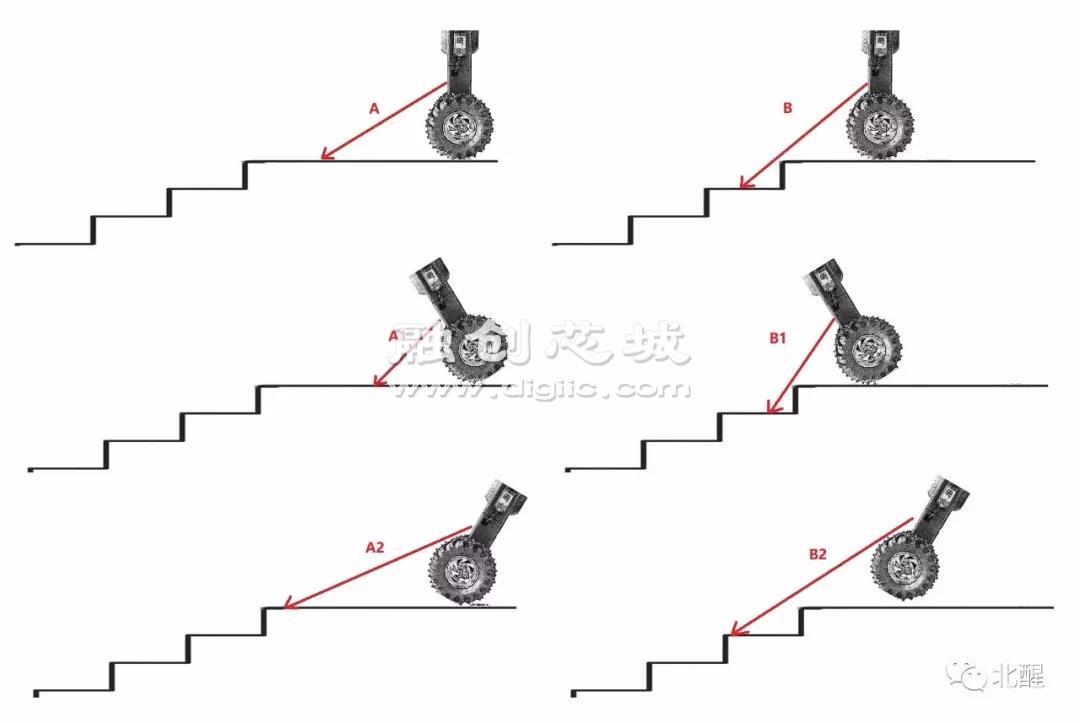
依据这个原理,便可以判断前方路面是否有阶梯或凹陷,使之采取例如刹车、减速、转弯等防跌落措施。
3、应用开发注意事项
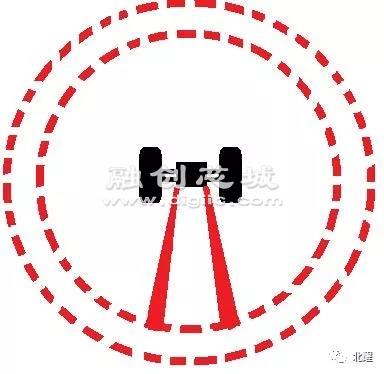
1. 大多数机器人身体两侧各有一个车轮,TFmini激光雷达视场角比较小,可以使用两个TFmini激光雷达分别监测左右车轮前方,减小覆盖盲区。同时激光雷达的安装位置和照射角度需要考虑到是否有遮挡,是否覆盖安全距离等因素。
2. 有些机器人在行进或制动过程中,自身可能会有俯仰角度,在使用算法判断时,这些数据也需要综合考虑进去。
3. 探测路面尽量避免玻璃镜子等高反光路况,这些路况使用激光雷达照射可能导致距离数据不可信。多传感器数据综合应用是一个可以提升可靠性的方法。
4. 应用拓展。
TFmini激光雷达除了可以用于机器人的防跌落功能外,还可以用于例如机器人避障、机器人唤醒等方面。当机器人拥有了激光雷达这双眼睛,便充满了无限的应用遐想。
4、应用优势
TFmini激光雷达作为场景应用的优势
1. 十分小巧的体积和紧凑的结构方便嵌入;
2. 精度较高并且性能稳定;
3. 低功耗;
4. 消费级的价格物美价廉;
5. 距离数据可转换为其他数据或者电平格式输出,可扩展性高。
电话010-57456983;
发邮件到bw@benewake.com;
欢迎大家留言
 回复
回复
 举报
举报
-

- 0000000000000000
-
1888 发帖7917 回复34980 积分
- 私信他 +关注

-

- 陈工-Elec-engineer
-
10 发帖100 回复524 积分
- 私信他 +关注





块
导
航
举报
请选择举报类别
- 广告垃圾
- 违规内容
- 恶意灌水
- 重复发帖
