

-

- 0000000000000000
-
1888 发帖7917 回复34980 积分
- 私信他 + 关注


搞定多轴无人机电机驱动+飞控算法,一颗i.MX RT1052就够了!
玩无人机的小伙伴们都知道,四旋翼无人机的BLDC电调电机,通常需要单独的MCU进行控制,如果用更加节能的FOC控制方式,那么对MCU的性能要求就比较高。一般讲,这颗MCU除去控制电机外,还会处理一些其它事情并留有余量,所以生产无人机的厂商,大都喜欢用Cortex-M4的MCU来做FOC控制(NXP的高主频+硬件除法器的M0+也完全可以胜任),也就是四旋翼无人机需要四颗较高性能的MCU,来分别控制四个电机。
除此之外,还需要一个至少是Cortex-M4级别的MCU做飞控,它需要读取传感器数据、控制飞行姿态、完成通讯等任务。
所有这些控制和操作,现在用一颗i.MX RT就都可以搞定了!i.MX RT性能强悍,以Cortex-M7为内核,主频高达600MHz,片内512KB RAM,同时具有4组PWM模块、适合多电机模拟信号采样的ADC_ETC模块,及丰富灵活的通讯接口,所以搞定飞控+4个BLDC电机控制自然不在话下。
我们接触到很多使用i.MX RT做无人机的实例,下面为各位展示两个优秀的方案。
基于i.MX RT1052的飞行学习板
“4个无刷电机FOC驱动 + 飞控算法”的单芯片解决方案,按竞赛级设计,有实力在无人机飞行大赛上争金夺银!
-
采用四元数互补滤波融合算法,和基于角速度环与角度环的串级PID姿态控制算法,在i.MX RT下控制频率可达2KHz(一般飞控频率为0.5KHz)。
-
支持自动校准功能,支持9轴或6轴IMU(惯量测量传感器)。
-
支持SBUS航模串口协议,适用于支持该协议的任意无线收发器。
-
支持常用的IIC/SPI/UART接口,可以扩展不同的传感器。
-
飞行学习板可以通过蓝牙模块,使用NXP的FreeMaster软件边飞边进行参数的调试。
-
提供的软件接口,可以让用户快速移植自己的飞控软件,或BetaFlight、ClenFlight、PX4、OpenPiliot、RaceFlight等软件。
-
图1是i.MX RT飞行学习板的真身!产品级软硬件设计,既可直接用于无人机,也可用于多电机FOC的应用评估,例如稳拍器、机器人、工业缝纫机等等。
-

-
图1,基于i.MX RT1052的飞行学习板实物图
 回复
回复
 举报
举报
-
- 0000000000000000
-
1888 发帖7917 回复34980 积分
- 私信他 +关注
 楼主
|
回复于 2018-09-30
沙发
楼主
|
回复于 2018-09-30
沙发
下图则是i.MX RT飞行学习板的电路结构:
核心是i.MX RT1052跨界处理器;
外接4路功率模块,用无感FOC算法驱动4个无刷电机;
外扩IMU传感器和气压计,可同时运行飞行控制算法;
同时预留了4个油门脉冲接口,可外接飞行控制器,学习板仅作为“4无刷电机FOC驱动”使用。默认整机7-12V/16A,可根据需求修改。
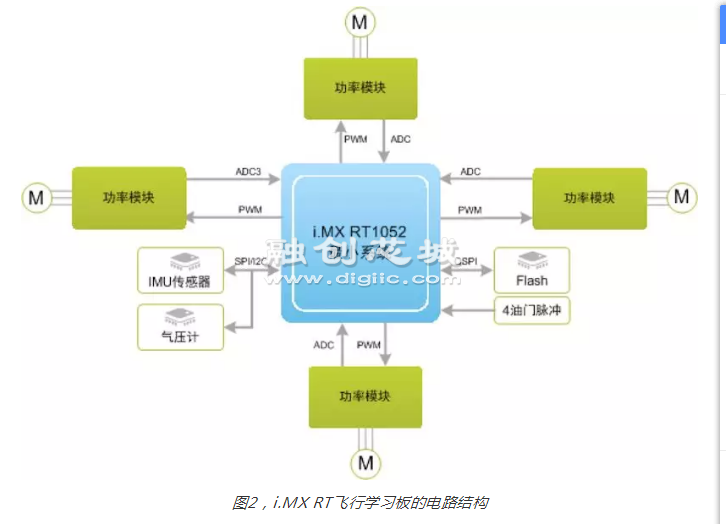
图2,i.MX RT飞行学习板的电路结构
i.MX RT飞行学习板,提供多种配套软件,包括:ZLG-FOC电机库、简易飞行控制算法、i.MX RT外设基础例程等。用户可快速搭建无人机产品,或其他多电机FOC的产品,例如稳拍器、机器人、工业缝纫机、IoT创新产品等等。
-
- 0000000000000000
-
1888 发帖7917 回复34980 积分
- 私信他 +关注









块
导
航
举报
请选择举报类别
- 广告垃圾
- 违规内容
- 恶意灌水
- 重复发帖
