




 楼主
楼主
ST峰会讲无人机小马哥:STM32F1四轴RoboFly全部资料等开源分享(原理图、PCB、3D模型、源代码等)
RoboFly是小马哥团队在2018年8月推出的一款完全开源的小四轴。
下面是RoboFly四轴飞行器的整体框图、原理图、pcb、实物图源代码的截图,先一睹为快,后面详细介绍。

图1:RoboFly四轴飞行器整体框图
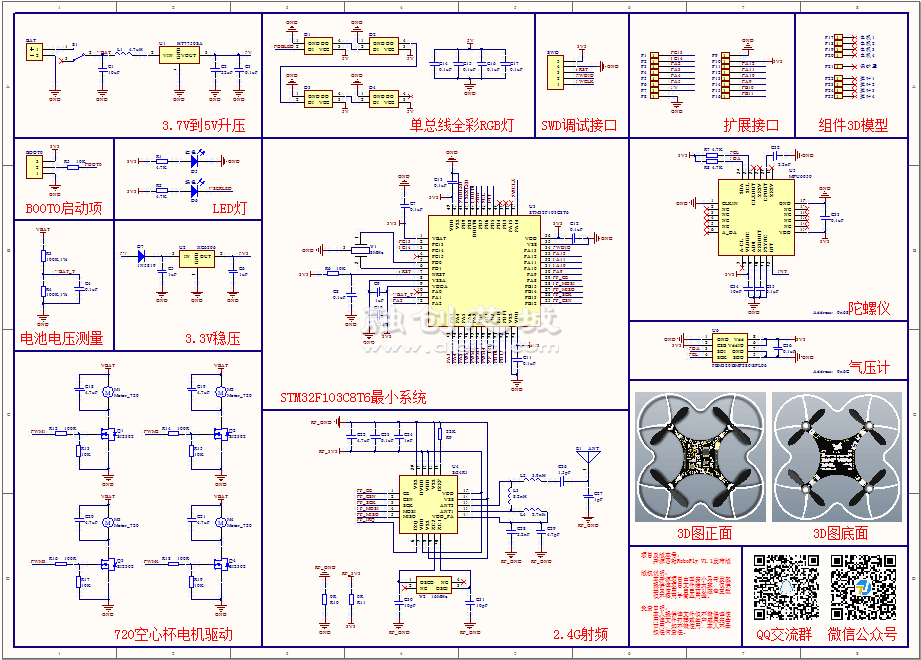
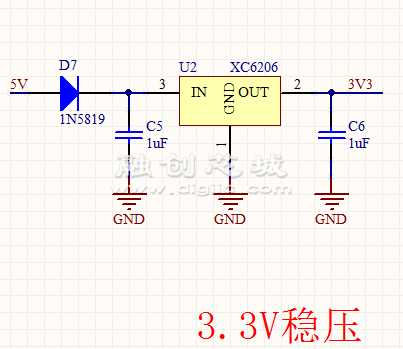
图2:RoboFly四轴飞行器原理图

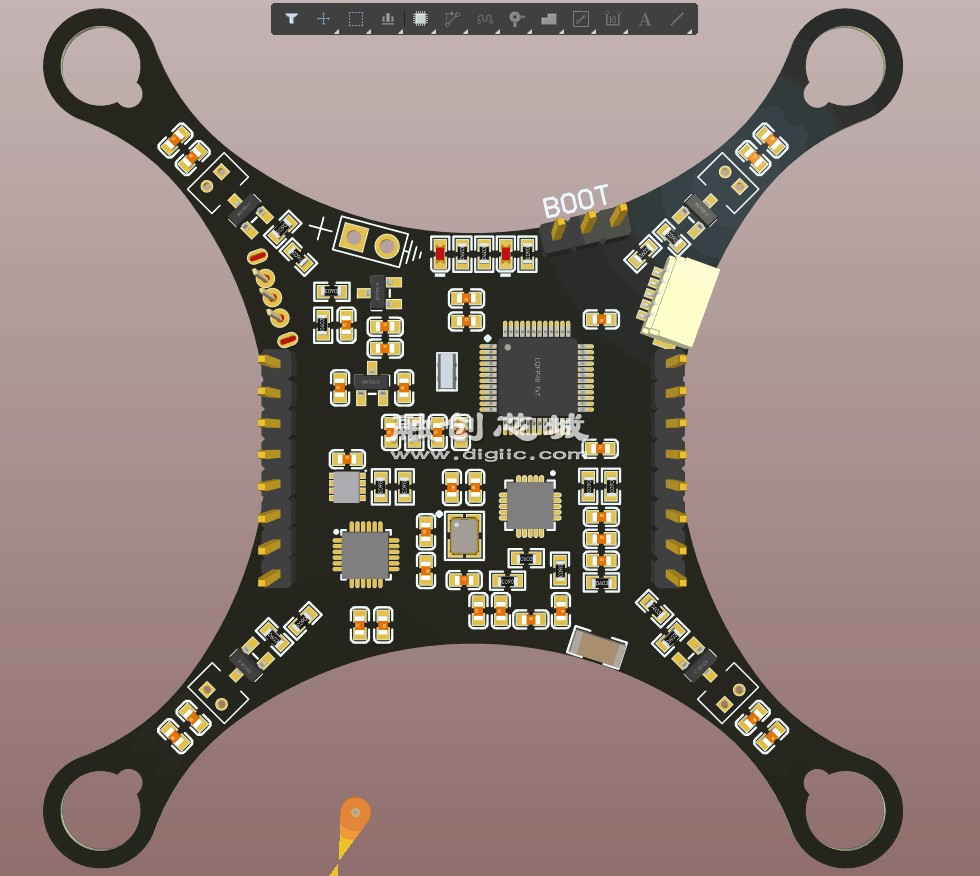
图3:RoboFly四轴飞行器PCB图
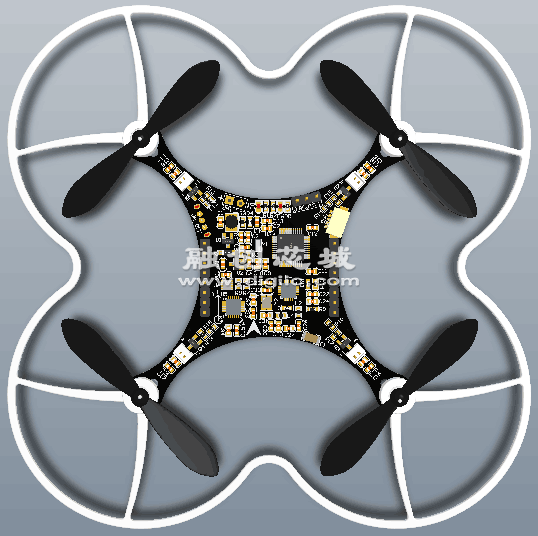
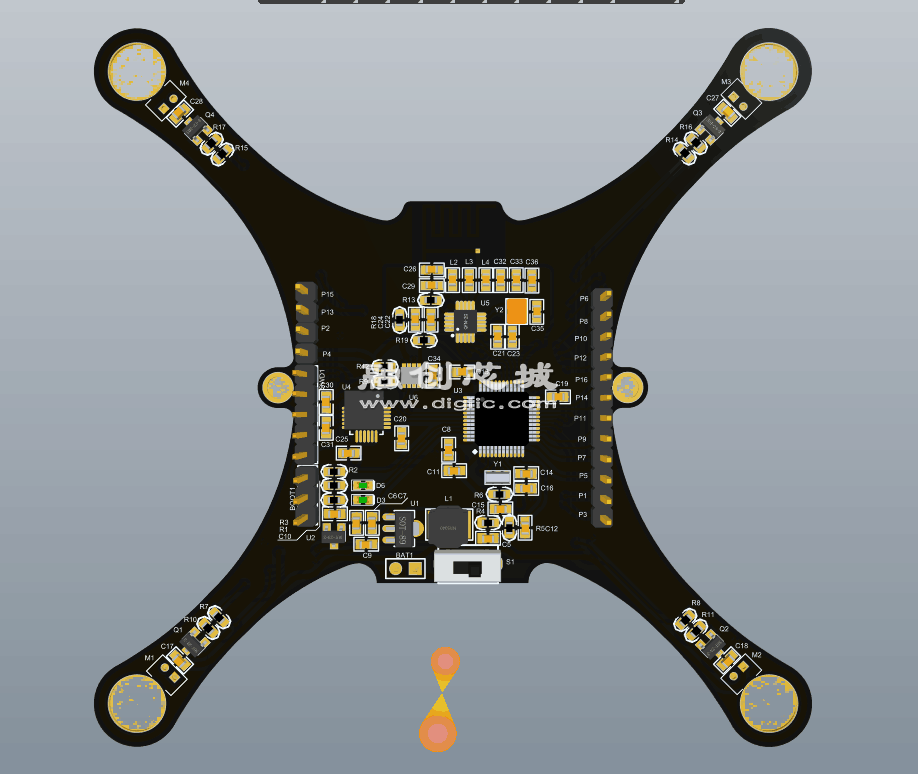
图4:RoboFly四轴飞行器PCB 3D俯图

图5:RoboFly四轴飞行器PCB 3D侧视图

图6:RoboFly四轴飞行器实物图
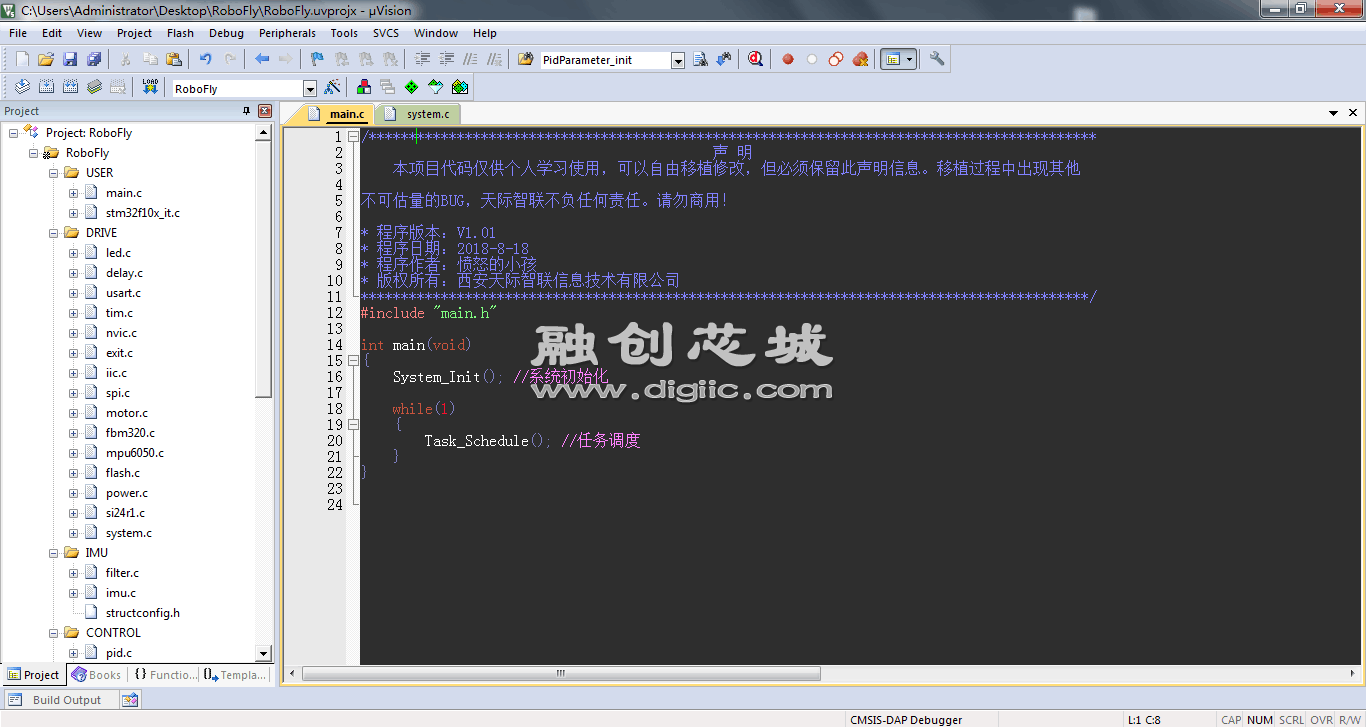
图7:RoboFly四轴飞行器源代码截图
制作并开源这套小四轴的初衷有如下几点;
1、 初学者需要一款价格低廉、软硬件资料完备、有技术支持的四轴学习平台;
2、 以散件形式发售,电路板布局、元器件封装选型要方便焊接组装;
3、 四轴所需元器件采购方便、靠谱,最好能提供一站式采购,避免过多邮费、采购周期长、采购到不合格元器件导致学习难以进展。
4、 源代码要极其精简、方便入门者能够方便的学习,实现自己的代码;
5、 保留一定扩展接口、方便用户自己进行扩展如定高、航迹、巡线等飞行功能。在学习完四轴飞行器之后,这个开源的四轴板子仍然可以作为一个STM32开发学习板使用,如果用户仅需学习软件课程,可选择由小马哥团队出品的有全套视频教程的DragonFly四轴飞行器。
RoboFly四轴的基本配置如下:
主控芯片:STM32F103C8T6
姿态检测:MPU6050
气压计: FBM320
无线芯片:SI24R1
供电方案:HT7750SA升压+XC6206稳压
灯光指示:1个电源指示LED、1个用户编程LED、4个单总线全彩RGB灯
电池:600mAh 20C 1S锂离子电池
电机:720空心杯
桨叶:55mm桨叶
桨叶保护罩:相邻轴距65mm
机架:PCB一体化机架
续航时间:10分钟
遥控距离:空旷50m
RoboFly四轴原理图各模块简单说明:

STM32F103C8T6是ST在2007年发布的一款MCU,截止目前ST已经发布了速度高达400MHz的STM32H7 (这时候一定有人会说600MHz的事,我知道,不用提醒),我自己也是用STM32F1,STM32F4,STN32F7都做过各种各样的四轴,但是这个开源的四轴我还是选择了STM32F103C8T6,主要从三点考虑,一是封装比较大,方便初学者焊接,二是价格低廉,学习成本比较低,三是网上有大量的资料供初学者学习使用。

姿态传感器选择MPU6050,主要考虑的也是封装比较大,可以直接使用烙铁焊接,而且价格比较低,资料也很丰富。而且还自带DMP库,可以完成姿态结算后直接把姿态角输出给主控芯片。2016年我们的第一款四轴就是采用DMP库输出姿态角的。
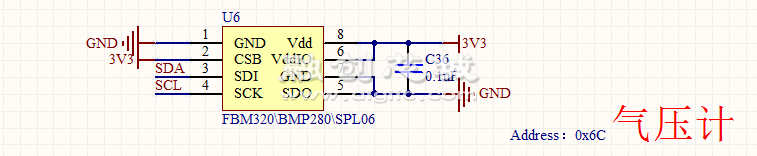
气压计使用的是FBM320,对于这款气压计,个人认为性能一般。但是优点就是这个封装和BMP280、SPL06的引脚都是兼容的,方便更换。但是小四轴上放气压计,有一个比较麻烦的地方就是要想办法排除桨叶的风对它的干扰。可以使用海绵等其他东西进行隔离。
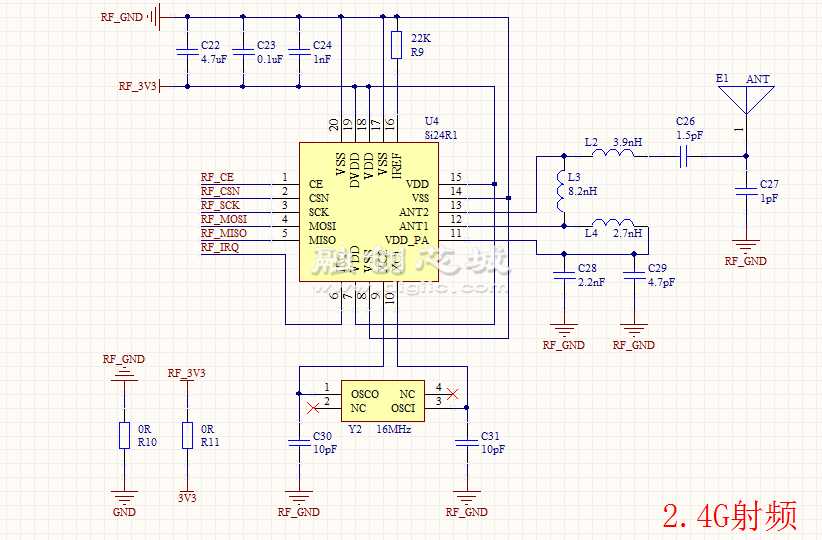
无线芯片用的是SI24R1,国产的,之所以用这个而不用NRF2401,是因为这个经过我测试,性能也是可以的,引脚完全兼容NRF2401,无线发射可以做到7dB,在发射和接收端都采用陶瓷天线的前提下,可以达到50m的通讯距离。如果加上AP,那达到100米应该没有问题。通过两个低成本的0欧姆电阻对电源进行了单点接地,防止电机回路的电流波动串进射频回路对射频造成干扰。
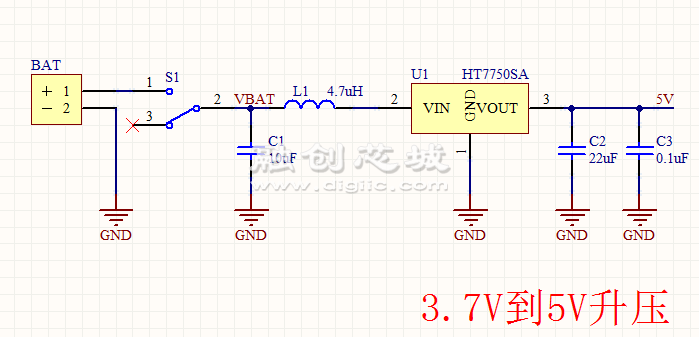
对于供电方案中的先升压再降压的方案,这是我做第一款四轴飞行器的时候发现的,这种1S的锂离子电池,在四个空心杯进行供电的时候,如果四个空心杯电机不带桨叶,也就是说没有负载,那启动是没有问题的。但是如果四个空心杯都带上负载,瞬间提速到满速,就会瞬间把电池输出电压拉低到3V以下,经过我测试甚至低到了2.8V,这时候如果不升压,直接用电池给LDO供电,那LDO就会失效。所以通过升压再降压后给单片机系统供电是一个可行的方案。另一个方案就是在电机启动的时候采用缓慢启动的方式,这样电池的电压就不会瞬间被拉低,但是这样的一个不足之处就是无法让这个小四轴非常暴力,飞起来不够爽快。
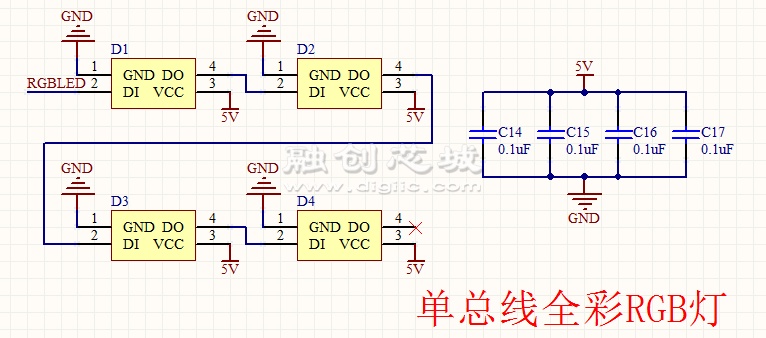
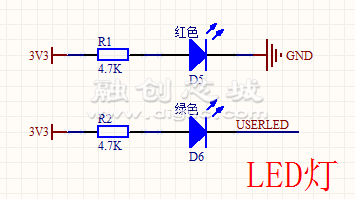
四个机臂上采用的RGBLED是串行单总线全彩灯,也就意味着只需要占用单片机的一个IO端口,就可以控制这四个灯发出各种各样的颜色。这个灯类似与WS2811,也是通过零一码来实现数据通讯,进而控制灯的颜色的。对于初学者而言,时序往往难以理解,而这个灯可以作为学习时序最简单的一个例程,虽然简单,但是却非常有趣。
因为小四轴的尺寸、重量等限制,这版四轴飞行器的电池最好不要超过600mAh,否则电池自身的重量就会成为最大的包袱。而太小的电池则不能提供较长时间的续航。总之我经过测试认为600 mAh容量应该是一个拐点。电池最好带保护板、有一定的安全性能。否则胀饱、失效事小,严重点在炸机的时候可能会爆炸。
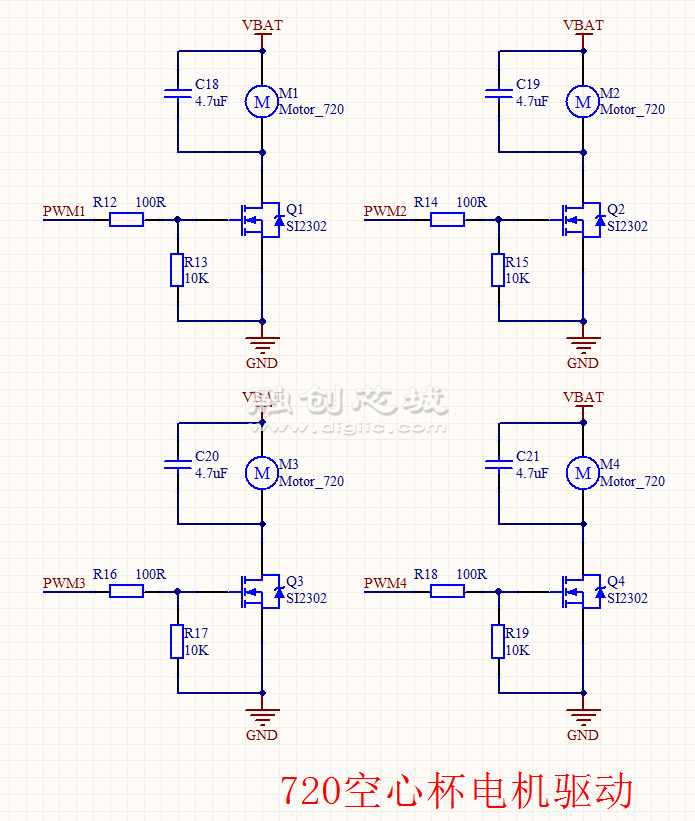
对于这个四轴最关键的一个组建—空心杯,说出来都是泪啊,做四轴两年,有一年的时间都在寻找合格的空心杯电机。2017年有一款四轴飞行器因为采购的电机侧向震动太大,导致桨叶转动之后产生很大的侧向震动、严重干扰了加速度计,使角度偏差很大,基本不能垂直飞行。一开始把问题锁定在MOS管上、陀螺仪上、原理图与PCB设计上都未能解决问题,后来对原始数据进行FFT变换后发现了干扰的频率点,这才确定是电机的侧向震动引起的。还有一种情况就是同一批次的电机性能差异很大,导致PID调节的输出差异很大,最终会影响MOS管的寿命、电机寿命。空心杯电机使用SI2302这款MOS管进行驱动,这是非常常见的一款MOS管,便宜又好用。但是市面上这个管子假货也比较多。很多人在电机驱动电路上加不加电容、加不加二极管有很大的争议,我经过测试发现,加上电容之后效果很好,而加上二极管的效果则一般。也可能是测试方式不够严谨,回头可以一起讨论这个问题。
桨叶选型一定要注意选择平衡性好的桨叶、做工有瑕疵的可能会影响平衡性,在飞行的时候,如果不平衡就会导致侧向震动。
初学者在调试四轴的时候,摔下来、失控是很常见的,所以加上桨叶保护罩之后,可以很大程度上减小桨叶、电机报废的概率。
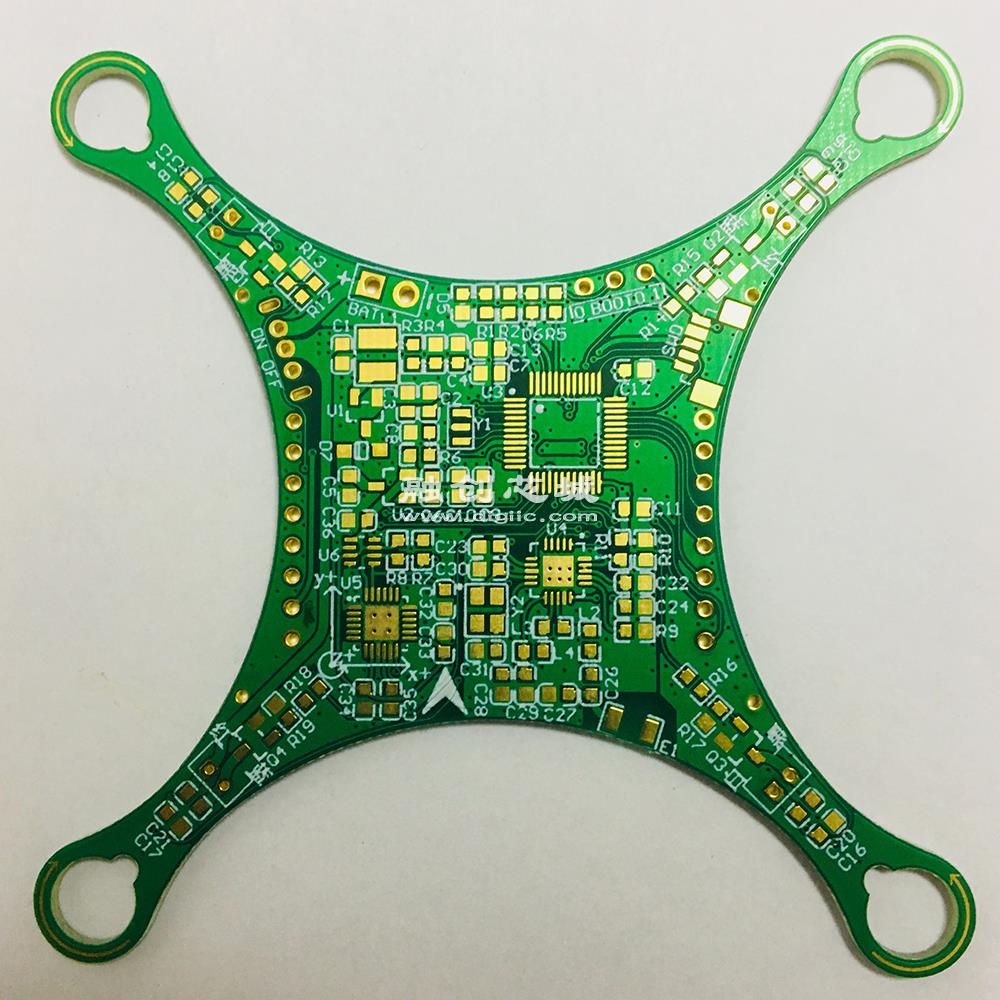
如果采用飞控板和机架隔离的方式,就能从一定程度上降低震动的影响,但是这样或许会增加重量及成本,所以我选择了PCB机架,这也是初学者最容易实现的一个方案,但不是唯一的方案。
网友diy:
以下是全部资料:
四轴源码采用Keil MDK V5.20
STM32库使用的是标准库
四轴源代码工程创建方法可以参考我们最小系统板的课程,课程视频可以在公众号观看,本文下载链接中也提供了工程创建的PDF文件。
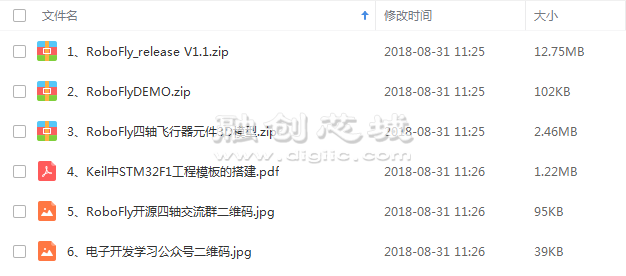
附件中包括以下五个文件:
1、RoboFly_release V1.1.zip(PCB工程,使用AD09创建)
2、RoboFlyDEMO.zip(源代码工程,使用Keil MDK V5.20创建)
3、RoboFly四轴飞行器元件3D模型.zip(3D模型,使用Solidworks 2013创建)
4、Keil中STM32F1工程模板的搭建.pdf
5、RoboFly开源四轴交流群二维码.jpg
6、电子开发学习公众号二维码.jpg
 回复
回复
 举报
举报

-

- 55f86ba6fcb44d2
-
0 发帖29 回复156 积分
- 私信他 +关注
-
- ec9d1d3f820b4e6
-
0 发帖2 回复104 积分
- 私信他 +关注
-
- yz_rcxc2018
-
0 发帖63 回复224 积分
- 私信他 +关注
-
- chen865538070
-
0 发帖1 回复104 积分
- 私信他 +关注
-
- zhangxinwei0212
-
0 发帖9 回复118 积分
- 私信他 +关注
-
- 9173ffcef78f4a1
-
0 发帖1 回复102 积分
- 私信他 +关注

块
导
航
举报
请选择举报类别
- 广告垃圾
- 违规内容
- 恶意灌水
- 重复发帖
