


[资料]
机器人控制系统-嵌入式数字图像处理全部开源(网友开源)


9313
查看
153
回复
 楼主
楼主
分享到:
机器人控制系统-嵌入式数字图像处理全部开源(网友开源)
技术交流群:123768874
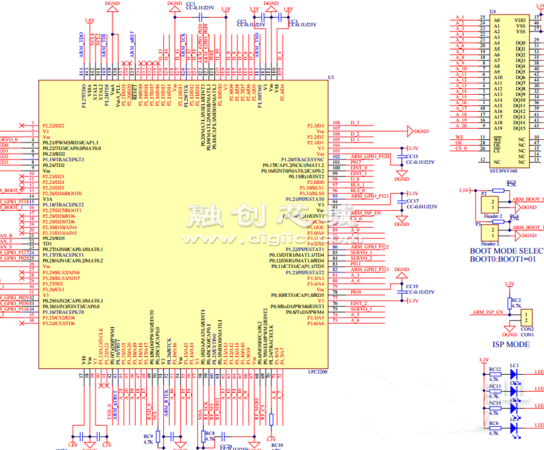
本文介绍一种嵌入式数字图象处理平台的实现方案,通过ARM和CPLD技术,构造一个数字图像处理平台作为嵌入式机器人控制系统的一个子系统。摄像头模块OV7620、IS61LV51216外扩RAM、LPC2292处理器、EMP1270-CPLD

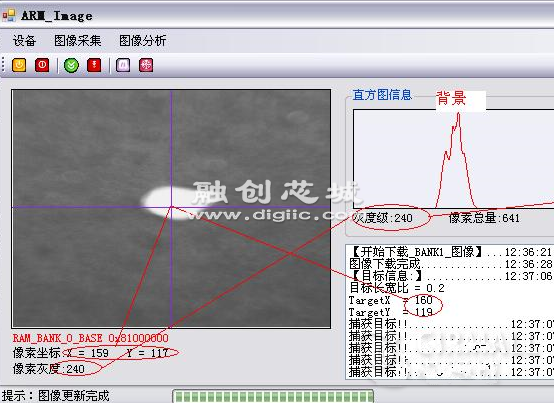
嵌入式数字图像系统需求包括图像采集和分析方面,考虑到作为移动机器人系统应用,因为机器人移动速率比较低的情况下,每秒10到15帧的图像刷新速率基本可以满足系统要求。同时,对图像的分辨率的要求可以在640×480以内的范围内可调,一般情况下选择640×480和320×240两种主要的分辨率模式。

作为移动机器人系统,一种无线通信机制应该是必备的组成部分。作为子系统的图像系统来说,一定的无线通信能力也可以满足独立构成控制器的需要。以一种高速通信协议为基础实现图像处理结果上传和指令下载成为了系统需求的一部分。最后,考虑到图像系统有可能单独构成控制器,对其控制能力就提出来更多的要求,比如提供一定数量的GPIO和多种外设功能。
附件内容包括:
- 论文一篇,有系统的思路,大体方案,算是粗略参考一下吧
- 原理图一套,共三张
- 代码一套,分:ARM,VHDL ,C#三个部分,分别是三个文件夹
- PPT报告一份,本人就相关主题做的一次报告的PPT,数字图像处理基础,本人论文主题和国外的研究相关情况
- 更多介绍说明,详见其论文讲解。
原理图:
系统结构框图:
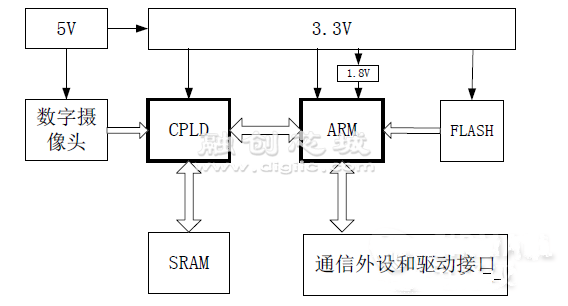
硬件组成框图:
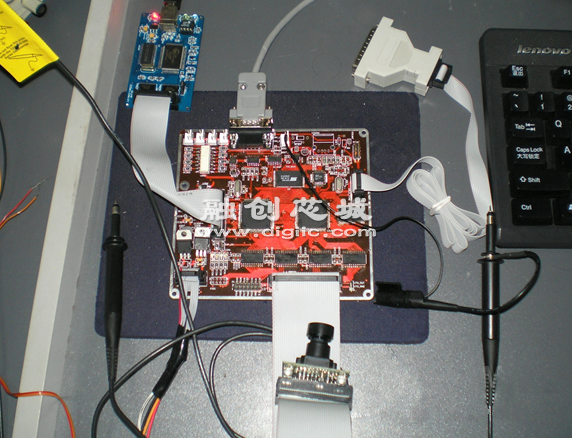
实验图片展示:
(3 )
(6 )
 回复
回复
 举报
举报
-

- 0c251f22b491474
-
0 发帖110 回复198 积分
- 私信他 +关注

-
- 普通用户_b277f077ee2c4ff
-
0 发帖8 回复116 积分
- 私信他 +关注
发表回复

版
块
导
航
块
导
航
举报
请选择举报类别
- 广告垃圾
- 违规内容
- 恶意灌水
- 重复发帖
