

-

- 0000000000000000
-
1888 发帖7917 回复34980 积分
- 私信他 + 关注
[转载]
CREELINKS开源无人机资料共享(转)


7315
查看
31
回复
 楼主
楼主
分享到:
|
CREELINKS小四轴简介 诸多无人机爱好者想亲手动手DIY一个自己专属的无人机,买个现成的飞控板,组装一下就能飞(太easy,不仅毫无 成就感,而且啥也没学到)。搜罗一下现如今无人机市场,各种无人机琳琅满目,开源无人机才是DIY的最爱,笔者也 了解过无人机现状及相关开源的项目,如Crazepony、CrazyFile、Paparazzi UAV、Dronecode / PX4、OpenDroneM ap等,但大多数开源无人机上手难度大,代码晦涩难理解,且处于不同的处理器平台,移植相当困难,代码设计难以 借鉴及修改。小编特此打造一款与众不同的开源无人机。
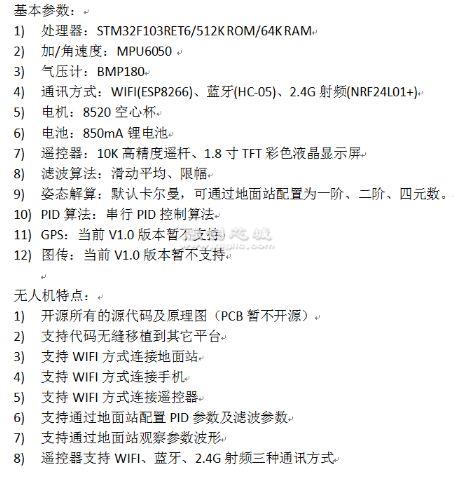
基本参数:
1) 处理器:STM32F103RET6/512K ROM/64K RAM
2) 加/角速度:MPU6050
3) 气压计:BMP180
4) 通讯方式:WIFI(ESP8266)、蓝牙(HC-05)、2.4G射频(NRF24L01+)
5) 电机:8520空心杯
6) 电池:850mA锂电池
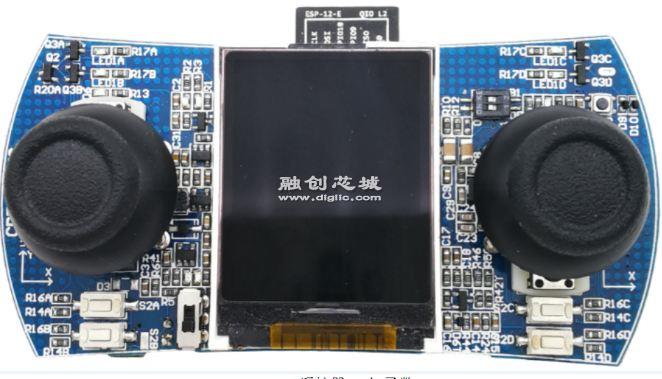
7) 遥控器:10K高精度遥杆、1.8寸TFT彩色液晶显示屏
8) 滤波算法:滑动平均、限幅
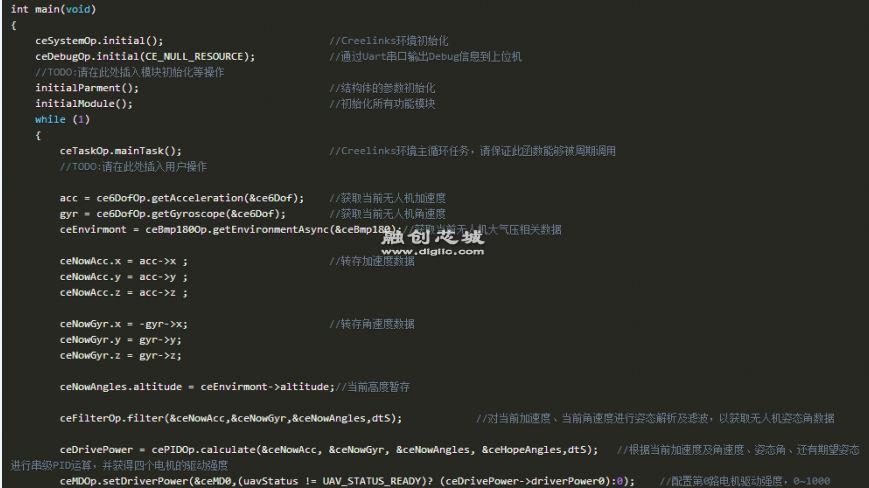
9) 姿态解算:默认卡尔曼,可通过地面站配置为一阶、二阶、四元数。
10) PID算法:串行PID控制算法
11) GPS:当前V1.0版本暂不支持
12) 图传:当前V1.0版本暂不支持
CREELINKS开源无人机有何不同?软件及硬件完全基于CREELINKS物联网平台的模块化设计思想,硬件模块抽象化、模块驱动对象化。整套实现的无人机代码,与底层处理器平台彻底无关,用户可很方便的移植到其它任何处理器平台。 无人机使用到所有模块原理图开源!PCB开源!模块驱动开源!飞控算法开源! { CREELINKS不是为了开源而开源,做到以下几点才叫开源: 1、软硬件结构简单、模块化设计,框架清晰,代码能读懂才是开源! 2、方便移植,可不做修改、或稍加修改,即可移植到其它硬件平台! 3、功能扩展性强! } 你可以从元件选型、原理图设计、PCB走线、代码编写,调试飞行姿态,整个流程完成无人机的设
计开发。360°无死角DIY
|


(10 )
(11 )
 回复
回复
 举报
举报




发表回复

版
块
导
航
块
导
航
举报
请选择举报类别
- 广告垃圾
- 违规内容
- 恶意灌水
- 重复发帖
