




 楼主
楼主
1.案例说明
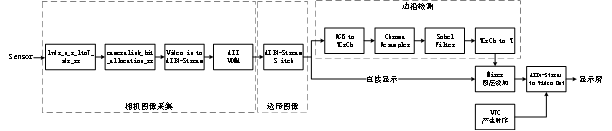
- PL端接入CameraLink相机,通过Base模式采集图像(1280*1024),然后通过VDMA缓存到PS端DDR。
- 使用AXI4-Stream Switch IP核将图像复分成两路,一路用于边缘检测处理(Sobel算法),另一路直接回显。
- 利用Video Mixer IP核将图像叠加,通过HDMI输出原始图像或者算法处理后的图像。本案例支持CameraLink Base/Full模式、彩色/黑白相机。
此开发详解基于创龙ZYNQ Z-7045/Z-7100评估板TLZ7xH-EVM展开。
2.案例框图
3.申请IP核license
本开发案例使用的Video Mixer和Chroma Resampler IP核,需要到官网下载IP核免费license,否则将无法通过TcL脚本生成Vivado工程。
请参照创龙TLZ7xH-EVM评估板(ZYNQ Z-7045/Z-7100)用户手册《Xilinx Vivado 2017.4及License安装教程》文档,导入IP核。
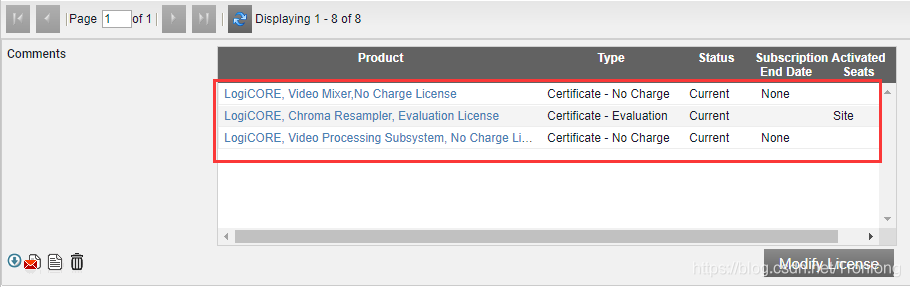
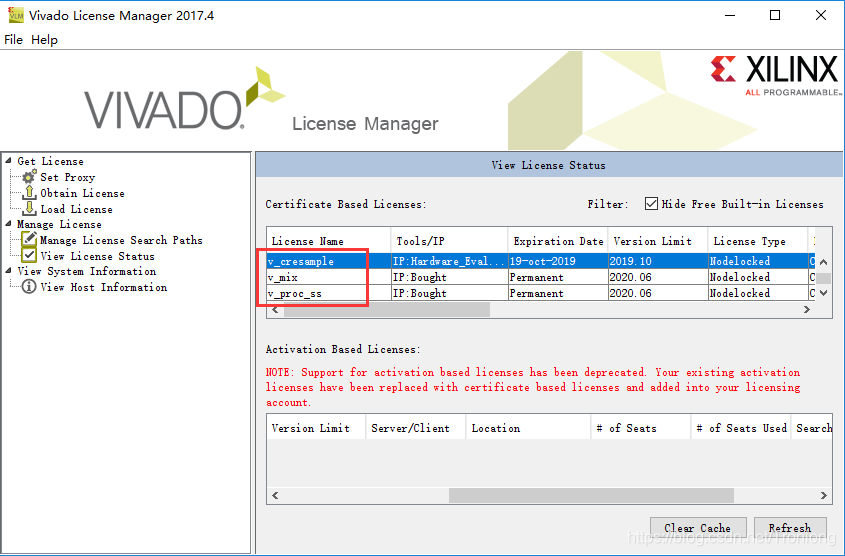
成功导入后,点击View License Status可以查看新添加的IP核license如下图。
4.Vivado工程说明
参照创龙TLZ7xH-EVM评估板(ZYNQ Z-7045/Z-7100)《基于TcL脚本生成Vivado工程及编译》文档,使用TcL脚本生成Vivado工程。
(1)生成评估板TLZ7xH-EVM、ZYNQ型号为xc7z100的Vivado工程:
Vivado# vivado -mode batch -source tl_cameralink_edge_display_project.tcl -tclargs tlz7xh-evm xc7z100ffg900-2
(2)生成评估板TLZ7xH-EVM、ZYNQ型号为xc7z045的Vivado工程:
Vivado# vivado -mode batch -source tl_cameralink_display_project.tcl -tclargs tlz7xh-evm xc7z045ffg900-2
进入Vivado工程所在的runs路径,双击.xpr文件打开工程。
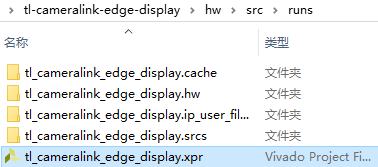
点击"IP INTEGRATOR -> Open Block Design",打开Vivado工程如下图所示。

Base模式
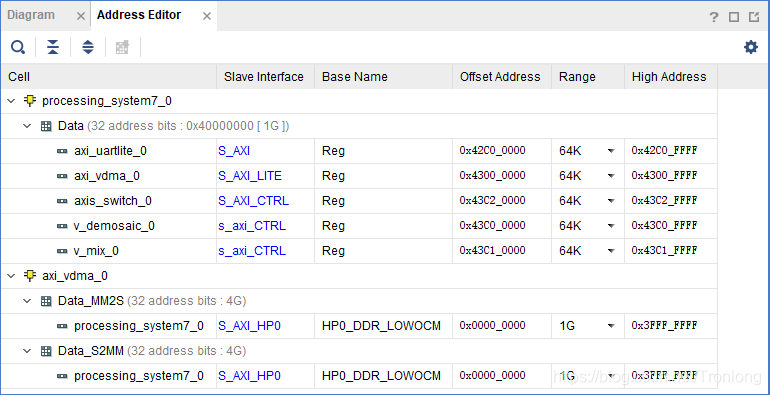
点击Address Editor选项,可以看到IP核分配的地址,在PS端可以通过配置这些地址(寄存器)来控制IP核。
5.案例演示
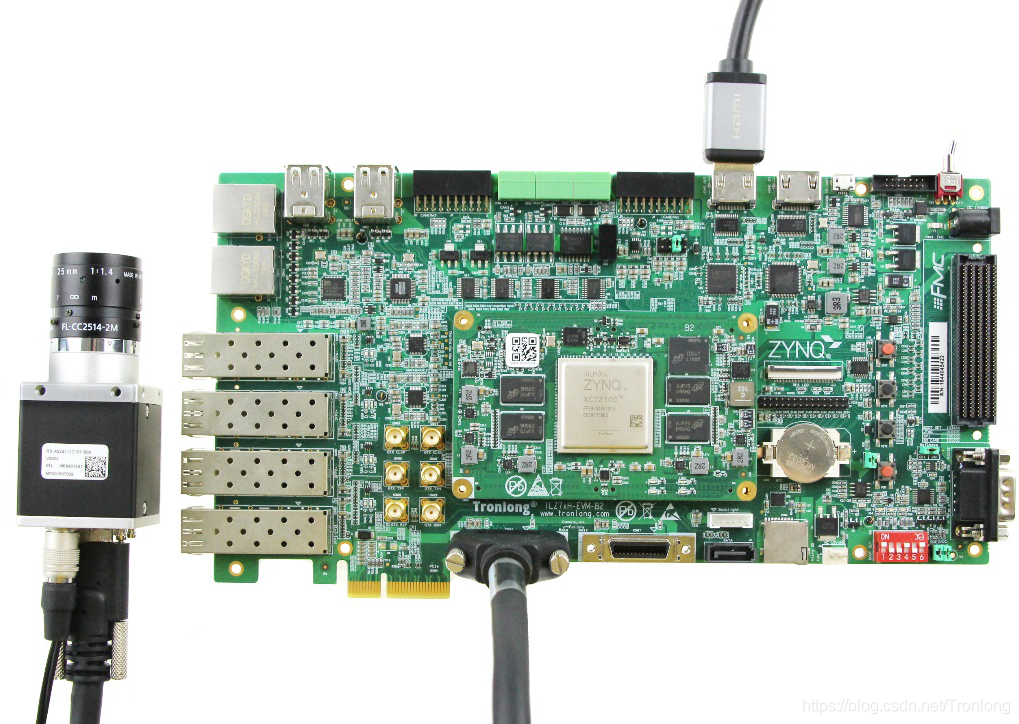
实验硬件说明
CameraLink相机参考型号:
- 彩色RS-A5241-CC107-S00,支持Full/Base,分辨率2560*2048,帧率107Hz
- 黑白RS-A5241-CM107-S00,支持Full/Base,分辨率2560*2048,帧率107Hz
参考下表和图将相机接到评估板CameraLink接口,显示器接到HDMI OUT接口。
|
模式 |
接口(相机-评估板) |
|
Base |
CL0-CON18 |
Base模式
基于Linux系统测试
评估板上电启动进入文件系统,执行如下指令新建一个"/lib/firmware"文件夹。将由Vivado工程编译生成的xxx.bin文件传送到评估板文件系统的"/lib/firmware/"目录下,并重命名为system_wrapper.bin。
参考创龙TLZ7xH-EVM评估板(Z-7045/Z-7100)用户手册《生成PL设备树及动态加载PL程序和设备树》文档,生成设备树,然后将编译好的dtbo文件拷贝到文件系统"lib/firmware"目录下。
Target# mkdir -p /lib/firmware/

HDMI OUT芯片接的是PS端的I2C,需要加载PS端设备树,加载成功后如下图所示。
Target# mkdir /configfs
Target# mount -t configfs configfs /configfs
Target# mkdir /configfs/device-tree/overlays/full
Target# echo -n zynq-zc706-overlay.dtbo > /configfs/device-tree/overlays/full/path
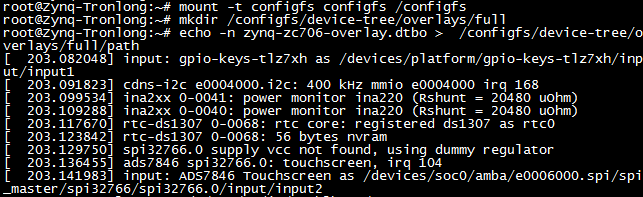
再加载PL端程序和设备树。可以看到AXI UART对应的节点为/dev/ttyUL1。
Target# mkdir /configfs/device-tree/overlays/cameralink
Target# echo -n "pl.dtbo" > /configfs/device-tree/overlays/cameralink/path

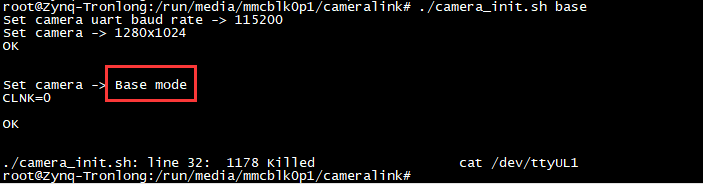
将例程image目录下的脚本拷贝到文件系统,执行脚本进行配置,即可在显示器看到相机采集的视频。
Target# ./camera_init.sh base //初始化CameraLink相机
Base模式
脚本说明:
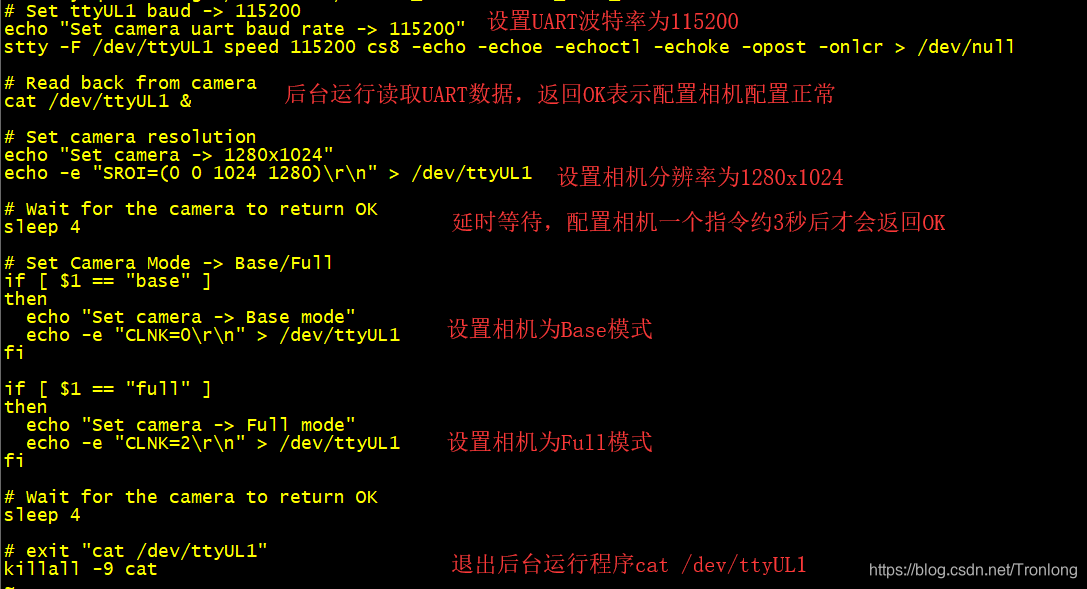
Target# ./sil9022_i2c_1080p.sh //初始化HDMI OUT
Target# ./axi_vdma_cameralink.sh //初始化VDMA
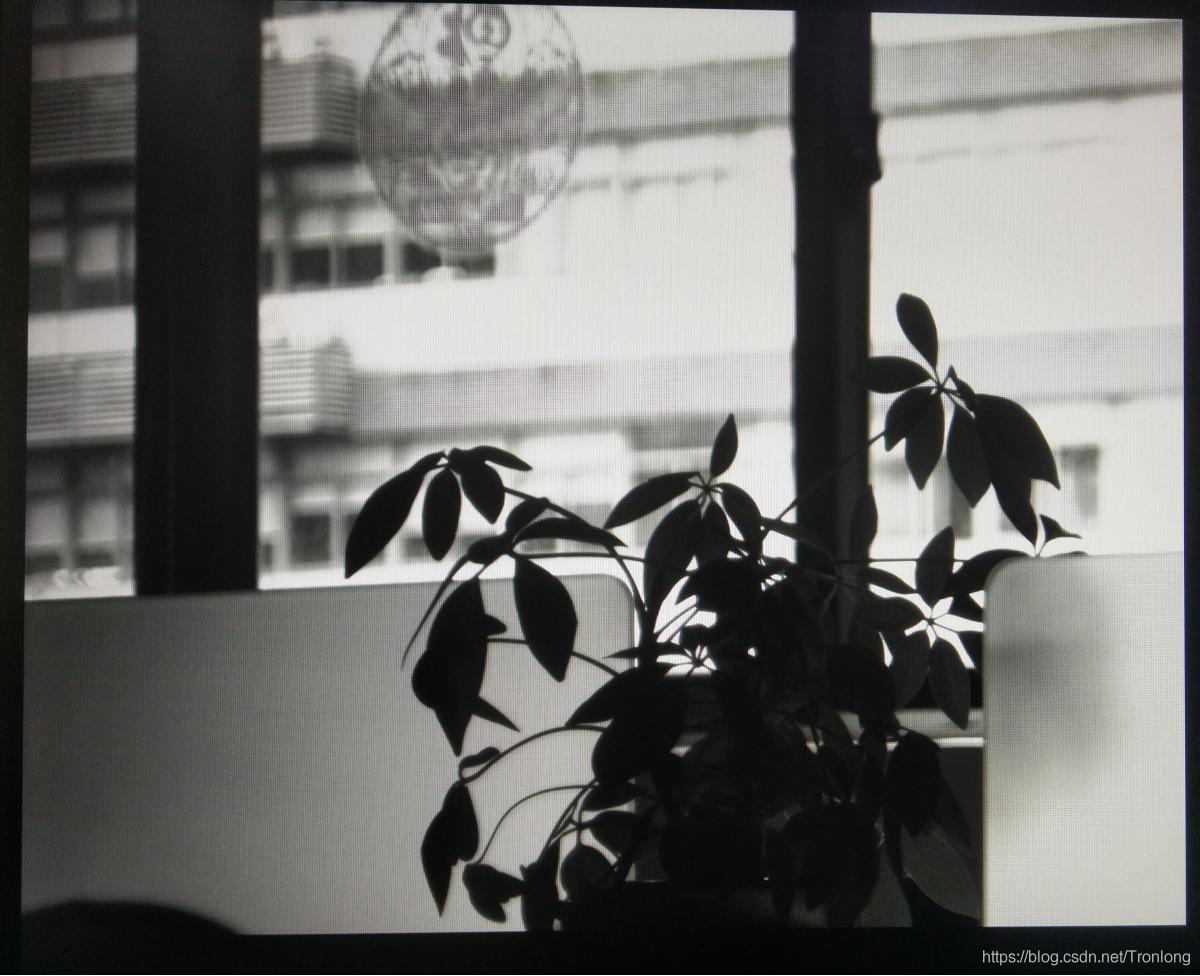
Target# ./switch_video.sh 1 //配置AXI4-Stream Switch IP核,参数1为原始图像
Target# ./mixer_init.sh 1 //初始化Video Mixer IP核,参数1为原始图像

Target# ./sobel_filter_init.sh //初始化Image_filter IP核
Target# ./mixer_init.sh 2 && ./switch_video.sh 2 //切换到算法处理后的图像

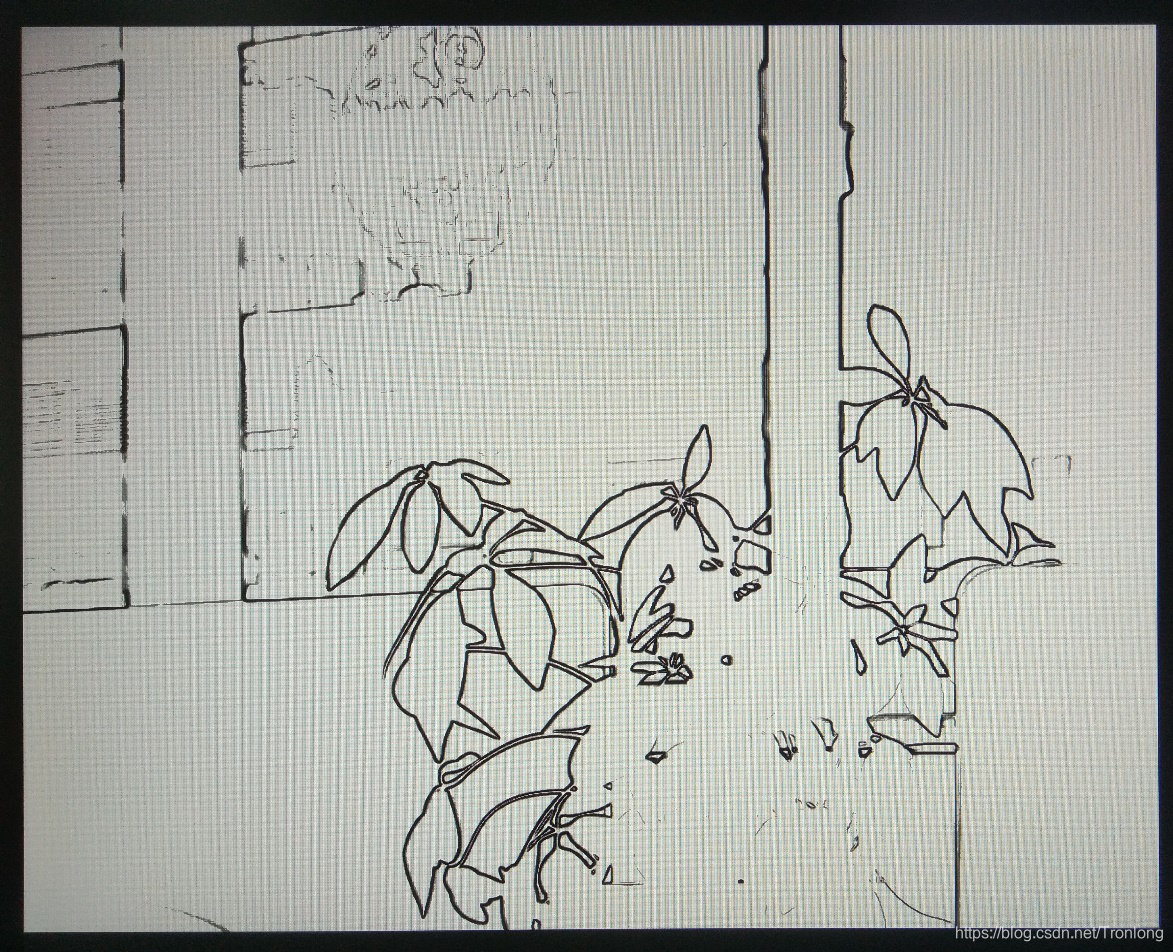
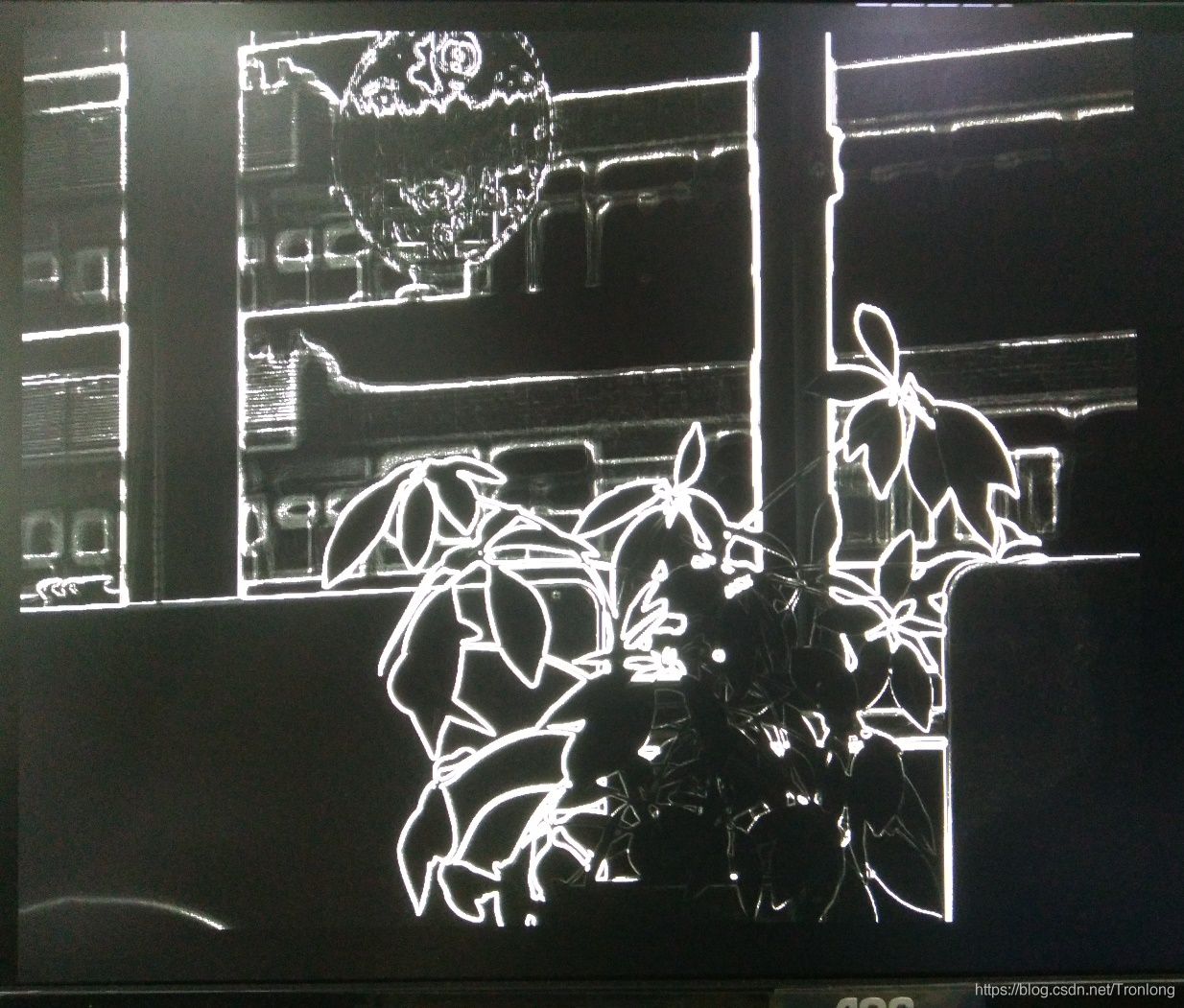
对于RS-A5241的相机,Base模式下,1280*1024的分辨率状态下,图像帧率有120+帧,所以图像曝光短,图像较暗,增大Image_filter IP的阈值可以获得更好的效果。
Target# devmem 0x43c000b4 w 0xff //设置高阈值为0xff
Target# devmem 0x43c000bc w 0xa0 //设置低阈值为0xa0
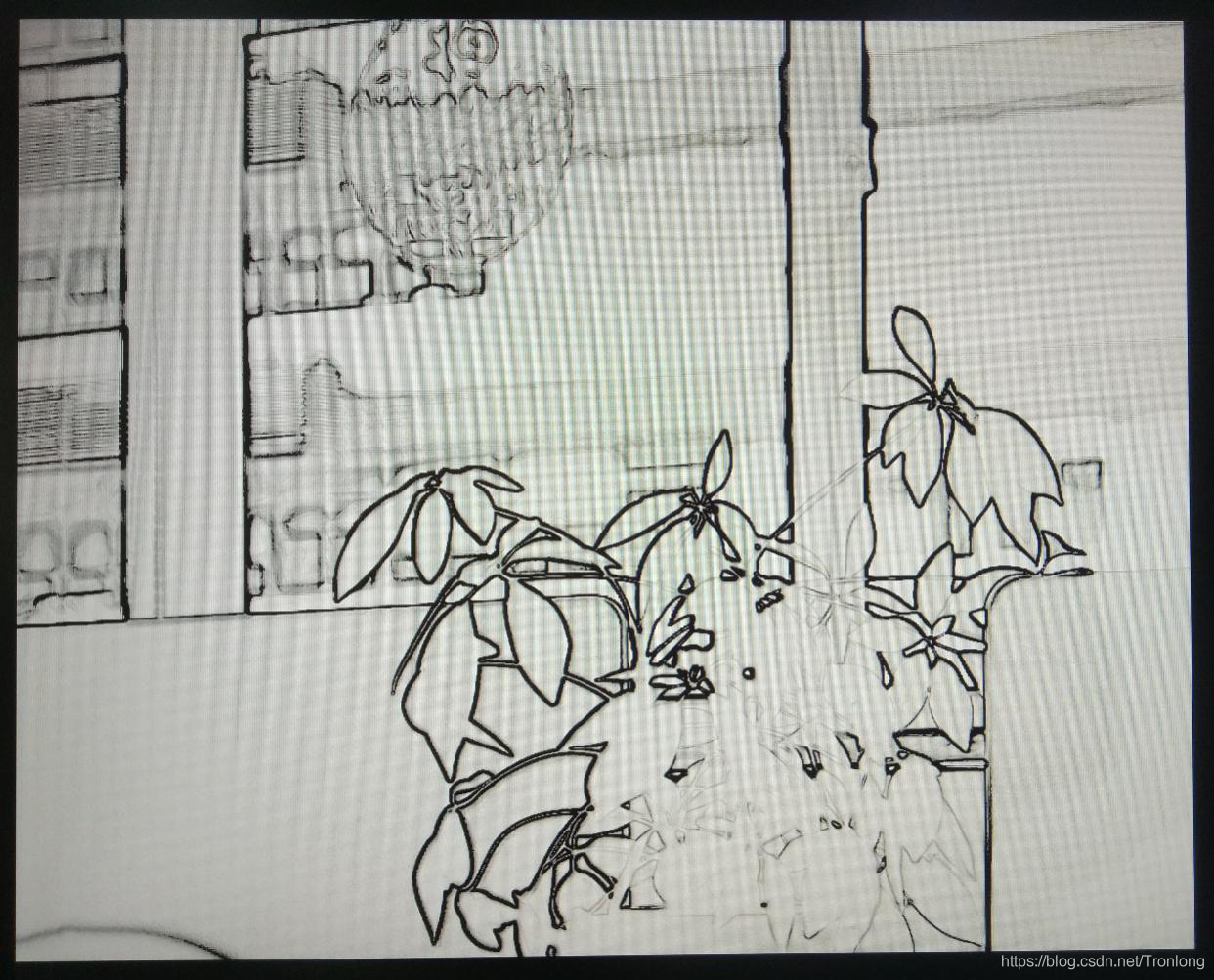
设置颜色反转:
Target# devmem 0x43c000c4 w 1 //0xc4寄存器设置为1,边缘为白色,若为0;边缘为黑色
 回复
回复
 举报
举报

块
导
航
举报
请选择举报类别
- 广告垃圾
- 违规内容
- 恶意灌水
- 重复发帖
