
首页 论坛 原厂专区 TRINAMIC嵌入式运动控制 基于Stm32F0+TMC2209步进驱动参考原理图PCB图教程源码等开源分享

-

- 0000000000000000
-
1888 发帖7917 回复34980 积分
- 私信他 + 关注



 回复
回复
 举报
举报
-
- 0000000000000000
-
1888 发帖7917 回复34980 积分
- 私信他 +关注
 楼主
|
回复于 2020-04-01
沙发
楼主
|
回复于 2020-04-01
沙发
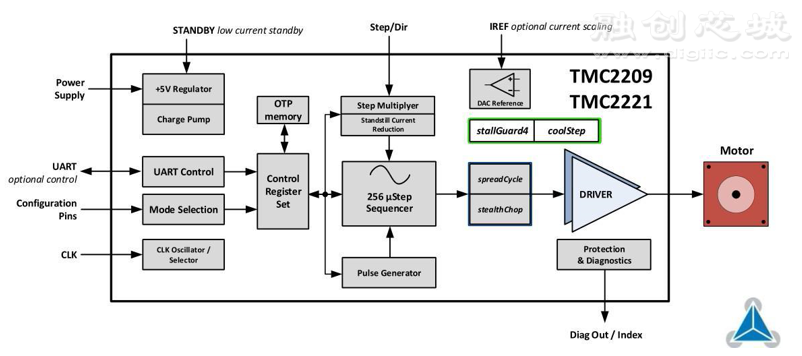
 和StealthChop2
和StealthChop2 ,同时支持静音和无传感力矩检测功能,无需限位开关。
,同时支持静音和无传感力矩检测功能,无需限位开关。
-
- 0000000000000000
-
1888 发帖7917 回复34980 积分
- 私信他 +关注
-
- 0000000000000000
-
1888 发帖7917 回复34980 积分
- 私信他 +关注
楼主
|
回复于 2020-04-01
3#
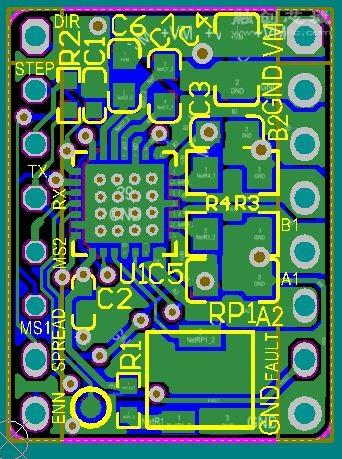
补充说明:
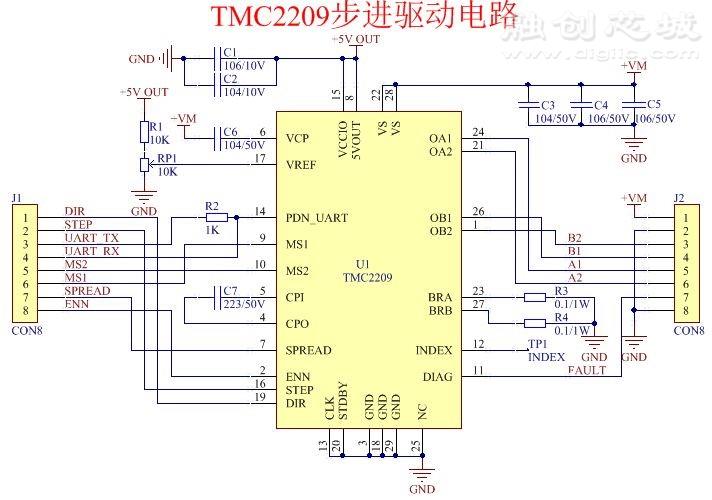
1、母线电容C3、C4、C5选择:一般是1A对应100uF左右(有条件的尽可能大);
2、电源保护:有条件的最好加防反接、TVS保护、以及保险丝等;
3、MS2、MS1设置细分;
4、芯片17脚VREF输入:电压越高对应的电流越大;
5、MS2、MS1:设置细分;
6、ENN、DIR、STEP:分别对应芯片使能、方向、脉冲;
7、SPREAD斩波模式选择:0=StealthChop(低速效果好),1=SpreadCyle(高速效果好);
-
- 0000000000000000
-
1888 发帖7917 回复34980 积分
- 私信他 +关注
-
- 0000000000000000
-
1888 发帖7917 回复34980 积分
- 私信他 +关注
-
- 0000000000000000
-
1888 发帖7917 回复34980 积分
- 私信他 +关注
楼主
|
回复于 2020-04-01
6#
三、软件说明
采用方向+脉冲(DIR+STEP)接口
芯片引脚跳线连接:
MS2: PA9
MS1: PA8
ENN: PA7
STEP: PA6
DIR: PA5
SPREAD:悬空未设置,最好通过MCU的IO进行控制;
-
- 0000000000000000
-
1888 发帖7917 回复34980 积分
- 私信他 +关注
-
- 0000000000000000
-
1888 发帖7917 回复34980 积分
- 私信他 +关注
楼主
|
回复于 2020-04-01
8#
程序参考如下:
SubdivisionSet(64); //细分设置为64
HAL_GPIO_WritePin(GPIOA,STEP_Pin, GPIO_PIN_SET); //STEP设置为高
/* USER CODE BEGIN WHILE */
while (1)
{
MoveStep(1,12800); //正转一圈
HAL_Delay(2000); //延时2S
MoveStep(0,12800); //反转一圈
HAL_Delay(1000); //延时1S
}
-
- 0000000000000000
-
1888 发帖7917 回复34980 积分
- 私信他 +关注
楼主
|
回复于 2020-04-01
9#
四、补充说明
1、上电顺序
电机驱动板(驱动芯片)先上电,底板控制板后上电;
2、电机
最好用42小电机测试;
3、发热问题
有条件的最好给芯片加散热片,芯片的15脚VCCIO最好使用外部电源供电,不要芯片的8脚5VOUT输出。
-
- 0000000000000000
-
1888 发帖7917 回复34980 积分
- 私信他 +关注
楼主
|
回复于 2020-04-01
10#
五、开源补充说明
如果确实需要原理图和PCB的用户,请联系我们的客服或管理员私下索取谢谢!
如对文档有疑问或有技术问题需要交流,可联系Trinamic原厂或我们。

块
导
航
举报
请选择举报类别
- 广告垃圾
- 违规内容
- 恶意灌水
- 重复发帖
