技术内容 元器件采购
首页 论坛 技术交流专区 MEMS/传感器 基于MEMS陀螺仪和加速度计的动态倾角传感器
本版 全部 搜索 高级搜索
回复
发帖
顶部
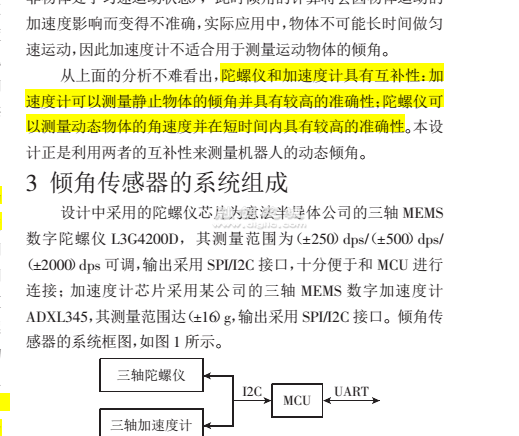
对于机器人,其重心和各关节姿态是研究关键。本文基于卡尔曼滤波算法,将MEMS加速计和陀螺仪数据融合,给出动态角度测量的方法。
本帖有更多资源,需 登录 才可以下载,没有帐号?立即 注册
回复于 2018-01-17 沙发
回复于 2018-08-10 2#
回复于 2020-01-20 3#
举报
请选择举报类别
×
发帖人已将看帖设置为付费看帖,请先购买后方可看帖
金额:¥
支付宝支付
微信支付
确认支付
全部板块
返回顶部





 楼主
楼主
 回复
回复
 举报
举报





