楼主
楼主
要求 MCU 控制嵌入式系统中越来越多的功能。这些功能通常是实时的,需要定期维护,以满足系统对响应性,性能或可靠性的要求。通常,实时操作系统(RTOS)用于管理多个实时事件,以确保响应能力足以满足系统要求。然而,并非所有 MCU 都适合托管 RTOS,因此,对允许或便于在特定 MCU 上托管 RTOS 的一些关键功能的审查对实时嵌入式系统的设计人员非常有用。
本文将快速回顾现代 MCU 上可用的一些关键功能,这些功能有助于运行需要 RTOS 的嵌入式系统。这将有助于设计人员更有效地选择 MCU 作为 RTOS 主机,并使用该 MCU 设计嵌入式系统。
管理实时响应
随着控制系统变得越来越复杂,使用简单的控制程序管理各种 MCU 功能变得越来越困难。对于具有不同优先级的多个事件,持续检查以查看哪些事件需要服务的单个控制循环变得难以处理。控制回路无法足够快地到达每个功能。所需要的是一种实时控制方法,其中所有事件都可以在其所需的响应时间内得到服务。
改善实时响应的另一个选择是使用实时操作系统或 RTOS。在该方法中,可以为控制系统中的每个任务分配 MCU 处理周期的时间片或部分。如果该功能不需要当前分配的时间,它可以将时间“翻转”到另一个功能,这样就不会丢失宝贵的处理周期。如果没有功能需要维修空闲过程(通常在低功率模式下),则可以启动以节省电力。可以调整分配的时间片以确保可用的最小时间量满足所需的响应时间。通过正确分配模数转换器,USB 端口和滤波器处理功能,系统将以可预测和有效的方式运行。
现代 MCU 已经过优化,可以轻松实现 RTOS 实施。也许最明显的是包含专用定时器,通常是与确定处理分配相关联的“定时器滴答”,这使得向时间片分配时间变得容易。可以与其他 MCU 活动并行执行任务的智能外围设备也很有用,因为相关的过程只需要“触发”事件,然后可以将控制权返回给另一个过程。例如,可以通过简单地编程 DMA 控制器以将 SRAM 数据移动到 USB 端口来启动 USB 传输。在清空缓冲区或发生错误之前,任务不需要执行任何其他活动。
让我们仔细看看一些最重要的支持 RTOS 的硬件元素,以便更好地理解我们如何优化基于 MCU 的 RTOS 实现。
使用高级中断控制器
由于基于 RTOS 的系统需要快速有效地响应实时事件,因此高级中断系统可能是基于 MCU 的设计中最重要的硬件元素。例如,如果中断需要太多周期来响应,可能是因为在调用中断例程之前需要保存几个 CPU 寄存器,实时响应可能会受到影响。此外,如果中断控制器只有少量可能的向量位置,软件可能需要几个周期才能找出中断源。例如,中断信号传输完成应该很容易与传输错误区分开来。
Microchip PIC24F MCU 具有一个高级中断控制器,具有实现基于 MCU 的 RTOS 所需的一些功能。 PIC24F 和 dsPIC MCU 系列的框图如图 1 所示。中断控制器在图中间以灰色显示,连接所有外设,定时器和多个输入信号,以提供全面的中断支持。多达 118 种不同的中断源,最多 5 种来自外部源。对于五个周期的固定中断延迟,中断响应时间对于任何应用都足够快。
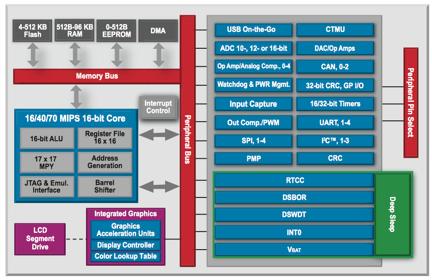
图 1:Microchip PIC24 和 dsPIC DSC 系列模块图。
PIC24 和 dsPIC DSC MCU 中断控制器还支持七个优先级,可以轻松区分最重要的事件和最不重要的事件。当对某些事件立即响应以及某些事件可以等待服务至关重要时,这尤其有用。例如,采集数据通常比处理数据更重要,因此采集事件的优先级通常高于处理事件。
 回复
回复
 举报
举报