
首页 论坛 原厂专区 TRINAMIC嵌入式运动控制 基于STM32F103+TMC2160:86步进电机和驱动一体原理图/PCB图/

-

- 0000000000000000
-
1888 发帖7917 回复34980 积分
- 私信他 + 关注


基于STM32F103+TMC2160:86步进电机和驱动一体原理图/PCB图/教程/源码/数据手册等开源分享
资料下载见附件,电脑登入
技术群:171897584
参考视频链接:http://club.digiic.com/Video/VideoDetail/38de7d90-5224-4485-8a8d-943ea1d00120


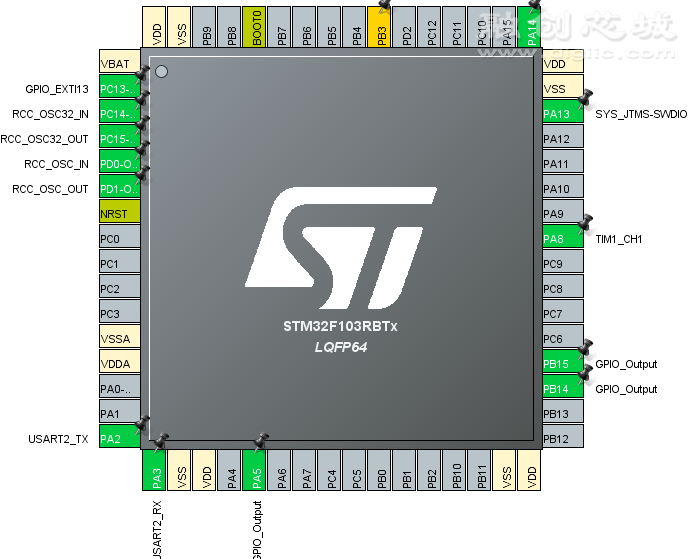
CUBE界面引脚配置:
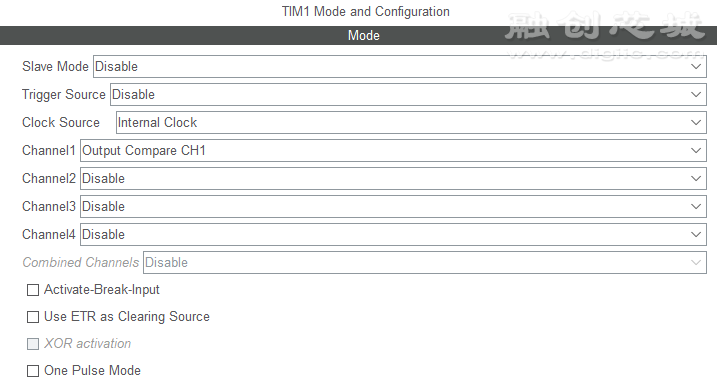
定时器1的PWM输出通道1设置:
 回复
回复
 举报
举报
-
- 0000000000000000
-
1888 发帖7917 回复34980 积分
- 私信他 +关注
 楼主
|
回复于 2020-04-29
11#
楼主
|
回复于 2020-04-29
11#
三、拨码开关设置
拨码开关ON:设置为高电平1,反之低电平0
细分设置:CFG1、CFG0
CFG1、CFG0:
11:64细分
10:32细分
01:16细分
00:8细分
运行电流设置:CFG4、CFG3、CFG2
CFG4、CFG3、CFG2:
111:IRUN=31
110:IRUN=28
101:IRUN=26
100:IRUN=24
011:IRUN=22
010:IRUN=20
001:IRUN=18
000:IRUN=16
Irms=Vfs/(IRUN/32)/(Rsense*1.414);
Vfs =325mV,Rsense为0.05欧时,则最大电流为4.5A左右;
-
- 0000000000000000
-
1888 发帖7917 回复34980 积分
- 私信他 +关注

-
- 0000000000000000
-
1888 发帖7917 回复34980 积分
- 私信他 +关注
楼主
|
回复于 2020-04-29
13#
斩波模式选择:CFG5
CFG5:
1:SpreadCyle模式,低速、低平稳运行模式
0:SpreadCyle模式,高速、高运动稳定模式
保持电流设置:CFG6
CFG6:
1:保持电流=运行电流/2
0:保持电流=运行电流
-
- 0000000000000000
-
1888 发帖7917 回复34980 积分
- 私信他 +关注
楼主
|
回复于 2020-04-29
14#
四、软件说明
DIR+STEP接口模式位置控制(无需SPI接口)
COM端:接24V或12V或5V
DRV_ENN、STER、DIR:接集电极开路输出
为测试方便:
COM端:接3.3V
DRV_ENN:使能,接PB14
DIR:方向, PB15
STEP:脉冲,PA8
-
- 0000000000000000
-
1888 发帖7917 回复34980 积分
- 私信他 +关注
楼主
|
回复于 2020-04-29
15#
初始化程序如下参考:
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_USART2_UART_Init();
MX_TIM1_Init();
STEPMOTOR_TIMx_Init(); /定时器输出初始化
/* USER CODE BEGIN 2 */
STEPMOTOR_OUTPUT_DISABLE(); //TMC2160禁止使能
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
STEPMOTOR_AxisMoveRel(6400*-2, 5000 , 5000 , 1200); //控制TMC2160驱动步进电机反转2圈(32细分,1.8度则一圈需要6400个脉冲)
LedOnOff(); //LED闪烁处理
STEPMOTOR_AxisMoveRel(6400*2, 5000 , 5000 , 1200); //控制TMC2160驱动步进电机反转2圈(32细分,1.8度则一圈需要6400个脉冲)
LedOnOff(); //LED闪烁处理
/* USER CODE BEGIN 3 */
}
-
- 0000000000000000
-
1888 发帖7917 回复34980 积分
- 私信他 +关注
楼主
|
回复于 2020-04-29
16#
//相对位置移动参考(参考硬石的电机开发板资料)
/**
* 函数功能: 相对位置运动:运动给定的步数
* 输入参数: step:移动的步数 (正数为顺时针,负数为逆时针).
accel 加速度,实际值为accel*0.1*rad/sec^2
decel 减速度,实际值为decel*0.1*rad/sec^2
speed 最大速度,实际值为speed*0.1*rad/sec
* 返 回 值: 无
* 说 明: 以给定的步数移动步进电机,先加速到最大速度,然后在合适位置开始
* 减速至停止,使得整个运动距离为指定的步数。如果加减速阶段很短并且
* 速度很慢,那还没达到最大速度就要开始减速
*/
void STEPMOTOR_AxisMoveRel(__IO int32_t step, __IO uint32_t accel, __IO uint32_t decel, __IO uint32_t speed)
{
__IO uint16_t tim_count;
// 达到最大速度时的步数
__IO uint32_t max_s_lim;
// 必须要开始减速的步数(如果加速没有达到最大速度)
__IO uint32_t accel_lim;
if(step < 0) // 步数为负数
{
srd.dir = CCW; // 逆时针方向旋转
STEPMOTOR_DIR_REVERSAL();
step =-step; // 获取步数绝对值
}
else
{
srd.dir = CW; // 顺时针方向旋转
STEPMOTOR_DIR_FORWARD();
}
if(step == 1) // 步数为1
{
srd.accel_count = -1; // 只移动一步
srd.run_state = DECEL; // 减速状态.
srd.step_delay = 1000; // 短延时
}
else if(step != 0) // 如果目标运动步数不为0
{
// 我们的驱动器用户手册有详细的计算及推导过程
// 设置最大速度极限, 计算得到min_delay用于定时器的计数器的值。
// min_delay = (alpha / tt)/ w
srd.min_delay = (int32_t)(A_T_x10/speed);
// 通过计算第一个(c0) 的步进延时来设定加速度,其中accel单位为0.1rad/sec^2
// step_delay = 1/tt * sqrt(2*alpha/accel)
// step_delay = ( tfreq*0.676/10 )*10 * sqrt( (2*alpha*100000) / (accel*10) )/100
srd.step_delay = (int32_t)((T1_FREQ_148 * sqrt(A_SQ / accel))/10);
// 计算多少步之后达到最大速度的限制
// max_s_lim = speed^2 / (2*alpha*accel)
max_s_lim = (uint32_t)(speed*speed/(A_x200*accel/10));
// 如果达到最大速度小于0.5步,我们将四舍五入为0
// 但实际我们必须移动至少一步才能达到想要的速度
if(max_s_lim == 0){
max_s_lim = 1;
}
-
- 0000000000000000
-
1888 发帖7917 回复34980 积分
- 私信他 +关注
楼主
|
回复于 2020-04-29
17#
//相对位置移动参考(参考硬石的电机开发板资料)
/**
* 函数功能: 相对位置运动:运动给定的步数
* 输入参数: step:移动的步数 (正数为顺时针,负数为逆时针).
accel 加速度,实际值为accel*0.1*rad/sec^2
decel 减速度,实际值为decel*0.1*rad/sec^2
speed 最大速度,实际值为speed*0.1*rad/sec
* 返 回 值: 无
* 说 明: 以给定的步数移动步进电机,先加速到最大速度,然后在合适位置开始
* 减速至停止,使得整个运动距离为指定的步数。如果加减速阶段很短并且
* 速度很慢,那还没达到最大速度就要开始减速
*/
void STEPMOTOR_AxisMoveRel(__IO int32_t step, __IO uint32_t accel, __IO uint32_t decel, __IO uint32_t speed)
{
__IO uint16_t tim_count;
// 达到最大速度时的步数
__IO uint32_t max_s_lim;
// 必须要开始减速的步数(如果加速没有达到最大速度)
__IO uint32_t accel_lim;
if(step < 0) // 步数为负数
{
srd.dir = CCW; // 逆时针方向旋转
STEPMOTOR_DIR_REVERSAL();
step =-step; // 获取步数绝对值
}
else
{
srd.dir = CW; // 顺时针方向旋转
STEPMOTOR_DIR_FORWARD();
}
if(step == 1) // 步数为1
{
srd.accel_count = -1; // 只移动一步
srd.run_state = DECEL; // 减速状态.
srd.step_delay = 1000; // 短延时
}
else if(step != 0) // 如果目标运动步数不为0
{
// 我们的驱动器用户手册有详细的计算及推导过程
// 设置最大速度极限, 计算得到min_delay用于定时器的计数器的值。
// min_delay = (alpha / tt)/ w
srd.min_delay = (int32_t)(A_T_x10/speed);
// 通过计算第一个(c0) 的步进延时来设定加速度,其中accel单位为0.1rad/sec^2
// step_delay = 1/tt * sqrt(2*alpha/accel)
// step_delay = ( tfreq*0.676/10 )*10 * sqrt( (2*alpha*100000) / (accel*10) )/100
srd.step_delay = (int32_t)((T1_FREQ_148 * sqrt(A_SQ / accel))/10);
// 计算多少步之后达到最大速度的限制
// max_s_lim = speed^2 / (2*alpha*accel)
max_s_lim = (uint32_t)(speed*speed/(A_x200*accel/10));
// 如果达到最大速度小于0.5步,我们将四舍五入为0
// 但实际我们必须移动至少一步才能达到想要的速度
if(max_s_lim == 0){
max_s_lim = 1;
}
-
- 0000000000000000
-
1888 发帖7917 回复34980 积分
- 私信他 +关注
楼主
|
回复于 2020-04-29
18#
// 计算多少步之后我们必须开始减速
// n1 = (n1+n2)decel / (accel + decel)
accel_lim = (uint32_t)(step*decel/(accel+decel));
// 我们必须加速至少1步才能才能开始减速.
if(accel_lim == 0){
accel_lim = 1;
}
// 使用限制条件我们可以计算出减速阶段步数
if(accel_lim <= max_s_lim){
srd.decel_val = accel_lim - step;
}
else{
srd.decel_val = -(max_s_lim*accel/decel);
}
// 当只剩下一步我们必须减速
if(srd.decel_val == 0){
srd.decel_val = -1;
}
// 计算开始减速时的步数
srd.decel_start = step + srd.decel_val;
// 如果最大速度很慢,我们就不需要进行加速运动
if(srd.step_delay <= srd.min_delay){
srd.step_delay = srd.min_delay;
srd.run_state = RUN;
}
else{
srd.run_state = ACCEL;
}
// 复位加速度计数值
srd.accel_count = 0;
}
MotionStatus = 1; // 电机为运动状态
tim_count=__HAL_TIM_GET_COUNTER(&htimx_STEPMOTOR);
__HAL_TIM_SET_COMPARE(&htimx_STEPMOTOR,STEPMOTOR_TIM_CHANNEL_x,tim_count+srd.step_delay); // 设置定时器比较值
TIM_CCxChannelCmd(STEPMOTOR_TIMx, STEPMOTOR_TIM_CHANNEL_x, TIM_CCx_ENABLE); // 使能定时器通道
STEPMOTOR_OUTPUT_ENABLE();
}
-
- 0000000000000000
-
1888 发帖7917 回复34980 积分
- 私信他 +关注
-
- 0000000000000000
-
1888 发帖7917 回复34980 积分
- 私信他 +关注

块
导
航
举报
请选择举报类别
- 广告垃圾
- 违规内容
- 恶意灌水
- 重复发帖
