楼主
楼主
摘要
锂离子(Li-Ion)电池是电动汽车和混合动力汽车的常用储能方法。这些电池可提供的能量密度在所有现有电池技术中是非常高的,但是如果要最大限度地提升性能,必须使用电池监控系统(BMS)。先进的 BMS 不仅使您能够从电池组中提取大量的电荷,而且还可以以更安全的方式管理充电和放电循环,从而延长使用寿命。ADI 公司提供种类齐全的 BMS 器件组合,专注于精度和稳健的运行。
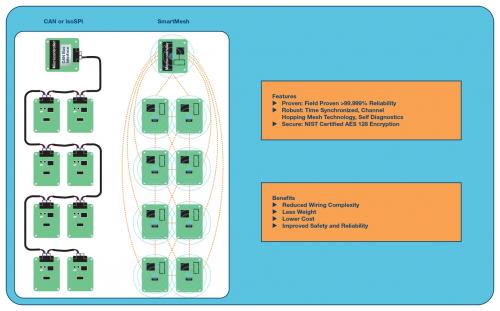
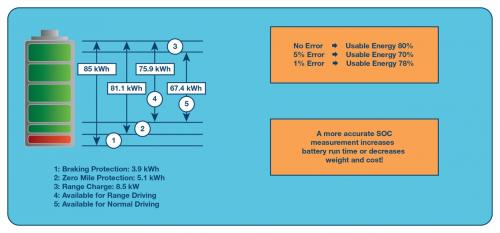
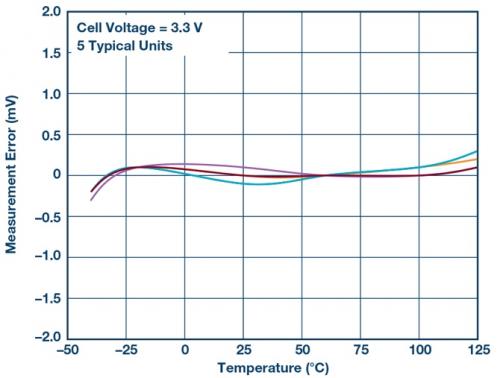
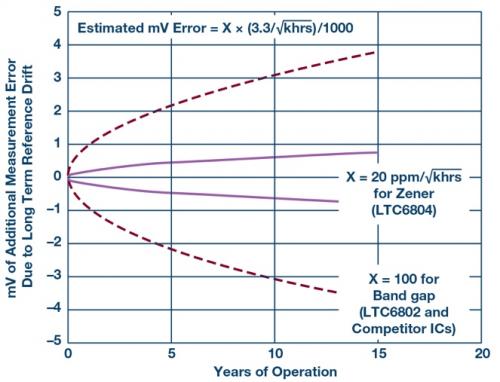
精确测量电池的充电状态(SOC)可以延长电池运行时间或减轻重量。精密稳定的器件在 PCB 装配后无需工厂校准。长期稳定性提高了安全性并可避免保修问题。自我诊断功能有助于达到合适的汽车安全完整性等级(ASIL)。电池组是充满电磁干扰(EMI)挑战的环境,因此在设计数据通信链路时要进行特别处理,以确保测量芯片与系统控制器之间稳健可靠的通信。电缆和连接器是造成电池系统故障的主要原因,因此本文介绍了无线解决方案。无线通信设计提高了可靠性并减轻了系统总重量,进而增加了每次充电的行驶里程。
简介
储能单元必须能够提供大容量,并且能以可控方式释放能量。如果不能进行适当的控制,能量的存储和释放会导致电池灾难性故障,并最终引起火灾。电池可能会由于多种原因而发生故障,其中大多数与不当使用有关。故障可能来自机械应力或损坏,以及以深度放电、过度充电、过电流和热过应力等形式表现出的电气过载。为了尽可能提高效率和安全性,电池监控系统必不可少。
BMS 的主要功能是通过监控以下物理量使电池组中所有单节电池保持在其安全工作区域(SOA)中:电池组充电和放电电流、单节电池电压以及电池组温度。基于这些数值,不仅可以使电池安全运行,而且可以进行 SOC 和健康状态(SOH)计算。
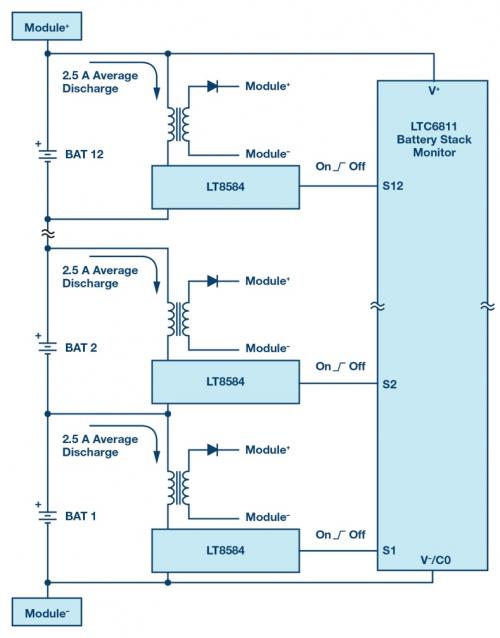
BMS 提供的另一个重要功能是电池平衡。在电池组中,可以将单节电池并联或串联放置,以达到所需的容量和工作电压(高达 1 kV 或更高)。电池制造商试图为电池组提供相同的电池,但这在物理上并不现实。即使很小的差异也会导致不同的充电或放电电平,而电池组中最弱的电池会严重影响电池组的整体性能。精确的电池平衡是 BMS 的一项重要功能,它可确保电池系统以其最大容量安全运行。
BMS 架构
电动汽车电池由几节电池串联组成。一个典型的电池组(具有 96 节串联电池)以 4.2 V 充电时会产生超过 400 V 的总电压。电池组中的电池节数越多,所达到的电压就越高。所有电池的充电和放电电流都相同,但是必须对每节电池上的电压进行监控。为了容纳高功率汽车系统所需的大量电池,通常将多节电池分成几个模块,并分置于车辆的整个可用空间内。典型模块拥有 10 到 24 节电池,可以采用不同配置进行装配以适合多个车辆平台。模块化设计可作为大型电池组的基础。它允许将电池组分置于更大的区域,从而更有效地利用空间。
ADI 公司开发了一系列电池监控器,能够测量多达 18 节串联连接的电池。AD7284 可以测量 8 节电池,LTC6811 可以测量 12 节电池,LTC6813 则可以测量 18 节电池。图 1 显示了一个典型的具有 96 节电池的电池组,分为 8 个模块,每个模块 12 个电池单元。在本示例中,电池监控器 IC 为可测量 12 节电池的 LTC6811。该 IC 具有 0 V 至 5 V 的电池测量范围,适合大多数电池化学应用。可将多个器件串联,以便同时监测很长的高压电池组。该器件包括每节电池的被动平衡。数据在隔离栅两边进行交换并由系统控制器编译,该控制器负责计算 SOC、控制电池平衡、检查 SOH,并使整个系统保持在安全限制内。
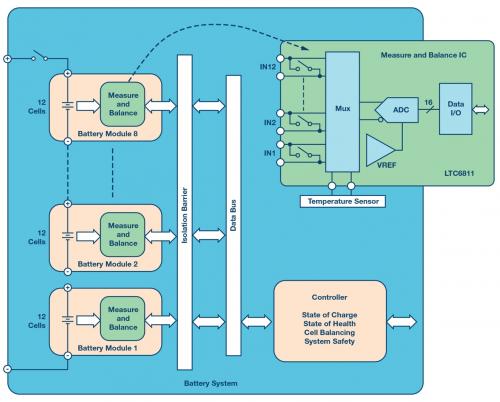
图 1. 采用 LTC6811 12 通道测量 IC、具有 96 节电池的电池组架构。
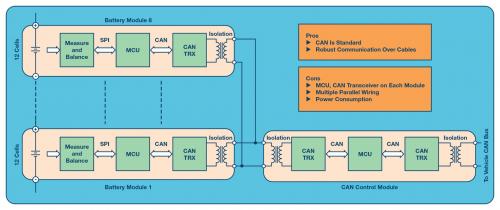
为了在电动汽车 / 混合动力汽车的高 EMI 环境中支持分布式模块化拓扑,稳键的通信系统必不可少。隔离 CAN 总线和 ADI 的 isoSPI™都提供了经过验证的解决方案,适合在这种环境中进行模块互联。1 尽管 CAN 总线为在汽车应用中互联电池模块提供了完善的网络,但它需要许多附加元件。例如,通过 LTC6811 的 isoSPI 接口实现隔离 CAN 总线需要增加一个 CAN 收发器、一个微处理器和一个隔离器。CAN 总线的主要缺点是这些额外元件会增加成本和电路板空间。图 2 显示了基于 CAN 的一种可行架构。在这个示例中,所有模块都并联连接。
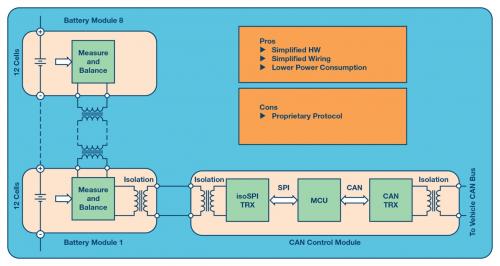
ADI 创新的双线式 isoSPI 接口是 CAN 总线接口的替代方法。1isoSPI 接口集成在每个 LTC6811 中,使用一个简单的变压器和一根简单的双绞线,而非 CAN 总线所需的四线。isoSPI 接口提供了一个抗噪接口(用于高电平 RF 信号),利用该接口可以将模块通过长电缆以菊花链形式连接,并以高达 1 Mbps 的数据速率运行。图 3 显示了基于 isoSPI 并使用 CAN 模块作为网关的架构。
图 2 和图 3 所示的两种架构各有利弊。CAN 模块是标准化模块,可以与其他 CAN 子系统共享同一总线运行;isoSPI 接口是专有接口,只能与相同类型的器件进行通信。另一方面,isoSPI 模块不需要额外的收发器和 MCU 来处理软件堆栈,从而使解决方案更紧凑、更易于使用。两种架构都需要有线连接,这在现代 BMS 中具有明显的缺点,因为在布线中,导线走线至不同的模块会成为一个棘手的问题,同时又增加了重量和复杂性。导线也很容易吸收噪声,从而需要进行额外的滤波。
 回复
回复
 举报
举报