




 楼主
楼主
ROS 简介
-
什么是ROS
ROS 是 Robot Operation System 的简称。是专门为机器人控制开发的系统。和一般的操作系统相比增加了软件包管理,信息通信框架等。同时这个系统对硬件进行了抽象使得各个组件之间的耦合更低,程序开发也更加方便快捷。 -
ROS 能在哪些平台上使用
ROS官方版本基于Ubuntu进行开发。所以无论是arm架构还是x86架构都可以使用。即使你所使用的平台无法安装Ubuntu或者Debian,只要能够安装Linux系统就可以从源码编译安装ROS。OSX也可以安装ROS,不过是测试版本,安装使用过程中可能会遇到问题,并不推荐大家使用。Windows的ROS已经实现,但并未完全开发完成。 -
ROS的版本区别
ROS每年5月发布一个版本。其中单数年份发布为短期版本,支持时间为2年。双数年份发布的版本为长期支持版,支持时间为5年。最新的长期支持版是Kinetic Kame。现在一般网上的教程是基于Hydro或者 Indigo。这些教程和Jade和Kinetic版本是通用的。
不同版本之间并不完全通用。比如你的机器人的系统是Indigo的,但是你的本地操作系统是Jade的那么系统间通信就有可能会出现消息格式不匹配的情况。所以不同系统间的版本尽量保持一致。 -
ROS的学习路线
ROS开发中主要使用的语言是C++和Python,你需要对这两种语言都比较熟悉。同时ROS基于Ubuntu操作系统,这也要求你对Ubuntu比较熟悉。
首先你可以先读完这篇文章,对于ROS的架构和基本概念有一个初步的认识。然后看官方wiki中的Tutorial 。
同时Learning ROS for Robotics Programming Second Edition也是一个不错的选择。
你也可以按照这个ROS思维导图的方式来学习。
在对ROS比较熟悉之后,如果你想了解更多关于ROS设计方面的东西可以看看REP
如果想要了解关于ROS2方面的信息可以看这里
在实际使用中会遇到很多问题,欢迎在我们的ROS交流群中提问(538456117)
当然想要更深入的了解ROS,阅读源代码也是一个不错的选择
ROS源代码
ROS2源代码
-
ROS的未来
ROS虽然大大方便了机器人开发,在业内有很广泛的应用,但是实际使用中还是有挺多问题。比如稳定性,网络带宽和多机器的情况下的自动连接等等。这些功能都会在ROS2中实现。随着ROS的不断发展,相信其在机器人行业会有越来越好的发展前景。
ROS的架构
ROS与其说是操作系统其实更像一个通信框架。ROS的基本单元是节点(Node)。节点之间可以通过订阅和发布Topic进行通信。节点的基本信息会存储在Master里面。下面以一个例子具体说明。假如我们现在有一个激光雷达,然后我们想要通过图形界面显示雷达的数据。那么整个结构就如下图所示
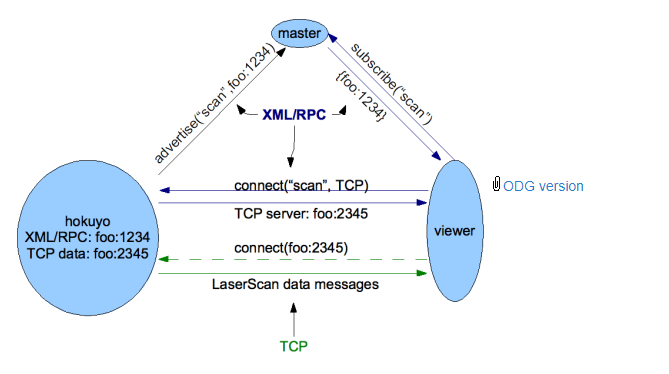
激光雷达有一个节点叫做hokuyo,图形界面有一个节点叫做viewer。激光雷达节点从传感器读出数据之后,首先告诉Master自己在发布一个叫做scan的topic。然后在本地监听2345端口,等待其他节点连接。图形界面节点viewer启动之后,首先告诉Master自己在订阅一个叫做scan的topic。这时候Master就会告诉viewer节点谁在发布scan。Viewer获得到hokuyo的地址和端口信息后和hokuyo节点建立TCP连接。这样激光雷达的数据就从hokuyo节点发送至viewer节点了。
通过这种架构可以实现节点的分布式处理功能。即不同的节点不要求一定在同一个机器人上。比如上例中的激光雷达节点和viewer节点就可以在不同的机器人上。也可以进一步实现多台机器人的调度。
ROS的基本概念
从上例我们可以看出ROS中有以下几个比较重要的基本概念
-
Master
Master就是存放各种节点和topic信息的地方。节点之间通过Master了解到对方的信息。同时在Master的帮助下节点之间建立网络连接。 -
Node
基本的ROS计算单元。 -
Topic
节点之间的通信通道 -
Parameter Server
参数服务器。在使用过程中可能不同的节点间要共享一些参数。这些参数就可以放在参数服务器里面。其作用就类似于不同节点公用的全局变量。在上面的例子中没有用到参数服务器。
ROS的安装
下面以Kinetic版本为例说明ROS的安装方法。
- 安装Ubuntu 16.04
- 添加ROS源
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
- 添加源的key
sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116
- 安装
sudo apt-get update sudo apt-get install ros-kinetic-desktop-full
- 初始化rosdep
sudo rosdep init
rosdep update
ROS的环境变量
ROS运行时依赖一些环境变量,所以我们要把其添加到自己的终端配置文件中。
echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc source ~/.bashrc
这样就会在bash中添加source /opt/ros/kinetic/setup.bash这样一行语句。每次打开一个终端都会执行上面的脚本。这个脚本会设置ROS相关的一些环境变量。
下一步
图传是大家经常会遇到的一个问题,ROS中图传的方法也有很多。下面就总结一下常用到的方法。
1.设置ROS_MASTER_URI的方式
a. 在本地计算机 /etc/hosts 文件添加
b. 在本地计算机设置 ROS_MASTER_URI 环境变量
c. 在本地计算机输入rostopic list 就可以看到远程计算机的topic了
就可以通过 image_view 打开远程图传了。
然而默认的传输方式图像是没有压缩的,占用的带宽非常大。可以通过添加压缩参数来传输。
这里实际上使用了image_transport这个包进行了压缩。这个包不仅能够压缩视频图像也可以压缩深度图像信息。不过这个压缩算法是逐帧压缩的,所以压缩的效率并不高,带宽使用率也比较高。但是实时性是比较高的。
2.使用 web_video_server 软件包
等待编译完成,启动节点
启动后在本地浏览器输入http://192.168.0.130:8080/stream?topic=/camera_node/image_raw&type=vp8,就可以在浏览器中打开远程视频了。这种方法也是不仅能够压缩一般图像数据也可以压缩深度图像数据,同时可以设置多种压缩方式。由于视频传输是采用的标准的http格式,所以客户端读取视频的时候可以完全脱离ROS的框架,使用起来也比较容易。这种压缩方式压缩效率也比第一种高很多。但是实际使用中发现实时性要差一点,这个和客户端如果处理数据关系比较大,比如缓存设置的比较大,就会有较大的延时。
参考资料:
ROS思维导图,方便大家了解ROS的各种知识点,来自ROS机器人俱乐部(538456117)的♔ ぅ美洲人,感谢他的总结。
在使用ROS进行定位导航等操作时,我们经常会遇到各种坐标系。每种坐标系都有明确的含义。理论上坐标系的名称可以是随意的,但是为了方便不同的软件间共享坐标信息,ROS定义了几个常见的坐标系。
1.base_link
x 轴指向机器人前方
2.odom
3.map
在非结构化的环境中(比如开放环境),如果我们要定义一个全球坐标系
在结构化的环境中(比如室内),在定义坐标系时和环境保持对应更有用。比如对于有平面图的建筑,坐标系可以和平面图对应。类似的对于室内环境地图可以和建筑物的层相对应。对于有多层结构的建筑物,对每一层单独有一个坐标系也是合理的。
4.earth
坐标系之间的关系
earth -> map -> odom -> base_link
额外的中间坐标系
多机器人坐标系的例子
earth --> map_1 --> odom_1 --> base_link1
odom到base_link的变换由里程计数据源中的一个发布
map到base_link通过定位组件计算得出。但是定位组件并不发布从map到base_link的变换。它首先获取odom到base_link的变换然后利用定位信息计算出map到odom的变换。
earth到map的变换是根据map坐标系选取所发布的一个静态变换。如果没有设置,那么就会使用机器人的初始位置作为坐标原点。
如果机器人的运动范围很大,那么极有可能是要切换地图的。在室内环境下,在不同的建筑物中,和不同的楼层地图都会不同。
odom坐标系的连续性
参考资料:
通过设置ROS_MASTER_URI,我们能够直接和远程主机进行通信。这样只要在远程端发出 image topic 然后在本地订阅这个 topic 就可以显示了。下面是一个具体例子
假设远程端已经有一个image topic 名称为 /camera_node/image_raw,远程端计算机名为 xiaoqiang-desktop, 其ip为 192.168.0.130。
192.168.0.130 xiaoqiang-desktop
export ROS_MASTER_URI=http://xiaoqiang-deskstop:11311
在本地计算机上输入
rosrun image_view image_view image:=/camera_node/image_raw
rosrun image_view image_view image:=/camera_node image_raw compressed
在远程端安装这个包。安装方法如下
在自己的工作空间中
git clone https://github.com/RobotWebTools/web_video_server cd ..
catkin_make
rosrun web_video_server web_video_server
ROS wiki: image_transport
ROS wiki: web_video_server
思维导图源文件 。需要安装xmind才能打开。也欢迎大家把自己的总结也加入进来,继续对其更新。

常见的坐标系
base_link坐标系和机器人的底盘直接连接。其具体位置和方向都是任意的。对于不同的机器人平台,底盘上会有不同的参考点。不过ROS也给了推荐的坐标系取法。
y 轴指向机器人左方
z 轴指向机器人上方
odom是一个固定在环境中的坐标系也就是world-fixed。它的原点和方向不会随着机器人运动而改变。但是odom的位置可以随着机器人的运动漂移。漂移导致odom不是一个很有用的长期的全局坐标。然而机器人的odom坐标必须保证是连续变化的。也就是在odom坐标系下机器人的位置必须是连续变化的,不能有突变和跳跃。
在一般使用中odom坐标系是通过里程计信息计算出来的。比如轮子的编码器或者视觉里程计算法或者陀螺仪和加速度计。odom是一个短期的局域的精确坐标系。但是却是一个比较差的长期大范围坐标。
map和odom一样是一个固定在环境中的世界坐标系。map的z轴是向上的。机器人在map坐标系下的坐标不应该随着时间漂移。但是map坐标系下的坐标并不需要保证连续性。也就是说在map坐标系下机器人的坐标可以在任何时间发生跳跃变化。
一般来说map坐标系的坐标是通过传感器的信息不断的计算更新而来。比如激光雷达,视觉定位等等。因此能够有效的减少累积误差,但是也导致每次坐标更新可能会产生跳跃。
map坐标系是一个很有用的长期全局坐标系。但是由于坐标会跳跃改变,这是一个比较差的局部坐标系(不适合用于避障和局部操作)。
坐标系的约定
如果在开发中这个约定不能完全保证,也要求尽量满足。比如对于没有GPS,指南针等传感器的机器人,仍然可以保证坐标系z轴向上的约定。如果有指南针传感器,这样就能保证x和y轴的初始化方向。
这个坐标系是为了多个机器人相互交互而设计的。当有多个机器人的时候,每个机器人都有自己的map坐标系,他们之间的map坐标系并不相同。如果想要在不同的机器人间共享数据,则需要这个坐标系来进行转化。
如果map坐标系是一个全局坐标系,那么map到earth坐标系的变化可以是一个静态变换。如果不是的话,就要每次计算map坐标系的原点和方向。
在刚启动的时候map坐标系的全局位置可能是不知道的。这时候可以先不发布到earth的变换,直到有了比较精确的全局位置。
坐标系之间的关系可以用树图的方式表示。每一个坐标系只能有一个父坐标系和任意多个子坐标系。
按照之前的说明,odom和map都应该连接到base_link坐标系。但是这样是不允许的,因为每一个坐标系只能有一个父坐标系。
这个图只表示了最少的坐标系。在保证基本的结构不变的情况下可以在其中加入中间的坐标系以提供额外的功能。
earth --> map_2 --> odom_2 --> base_link2
坐标系变换的计算
MAP之间的切换
在不同的地图间切换的时候,定位组件要恰当的把odom的parent替换成新的地图。主要是map到base_link之间的变换要选取恰当的地图,然后在转换成map到odom之间的变换。
在切换地图的时候,odom坐标系不应该受到影响。odom坐标系要保证连续性。可能影响连续性的情况包括进出电梯,机器人自身没有运动,但是周围环境发生很大的变化。还有可能由于运动距离太远,造成数据溢出。这些都要特殊进行处理。
ROS REP 105
 回复
回复
 举报
举报

块
导
航
举报
请选择举报类别
- 广告垃圾
- 违规内容
- 恶意灌水
- 重复发帖
