


[资料]
机器人比赛资料整理


1377
查看
6
回复
 楼主
楼主
分享到:
机器人比赛完事已经快一年了,文件夹一直封在那里没怎么管过,今天逛到这里,非常喜欢这种开源的氛围,也算是小小的支持一下论坛吧。
文件可能会比较凌乱,先上传一些代码,其他的资料我再慢慢整理。
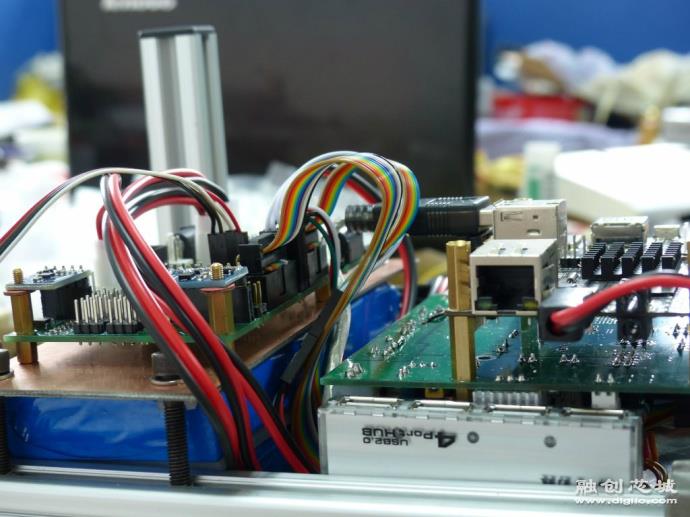
当时我主要负责底层,总体架构是STM32 + CPLD控制2个减速电机带正交编码,3个舵机,8个超声波。一个串口和cubieboard通信,接收下行指令并上传实时监测数据。另一个串口接收遥控器指令。两个都用的DMA方式。
PID部分是另一个同学写的,中间可能会有一些纯粹包装性质的函数,主要是俩人中间的链接用。
遥控器部分是最后临时用51加上去的,硬件也是随手焊,资料可能比较少。
Labview是我为了调试PID搭的一个算是可视化平台,接收STM32主串口(就是接cubieboard那个)的数据并且绘图显示出来,方便调整PID参数。
还有一个FPGA的文档,印象中貌似是控制舵机和超声波测距的,主要是STM32定时器不够用,就加了一块EPM570的片子。
资料先放上来这么多,有问题或者资料缺的可以回我,到时候再做补充,毕竟一年很多东西都还要整理。
文件可能会比较凌乱,先上传一些代码,其他的资料我再慢慢整理。
当时我主要负责底层,总体架构是STM32 + CPLD控制2个减速电机带正交编码,3个舵机,8个超声波。一个串口和cubieboard通信,接收下行指令并上传实时监测数据。另一个串口接收遥控器指令。两个都用的DMA方式。
PID部分是另一个同学写的,中间可能会有一些纯粹包装性质的函数,主要是俩人中间的链接用。
遥控器部分是最后临时用51加上去的,硬件也是随手焊,资料可能比较少。
Labview是我为了调试PID搭的一个算是可视化平台,接收STM32主串口(就是接cubieboard那个)的数据并且绘图显示出来,方便调整PID参数。
还有一个FPGA的文档,印象中貌似是控制舵机和超声波测距的,主要是STM32定时器不够用,就加了一块EPM570的片子。
资料先放上来这么多,有问题或者资料缺的可以回我,到时候再做补充,毕竟一年很多东西都还要整理。
最后嘚瑟一张当时的照片,就先这样吧。
(1 )
(0 )
 回复
回复
 举报
举报
-

- xiaomiking
-
1147 发帖6357 回复18609 积分
- 私信他 +关注


 回复于 2018-05-30
2#
回复于 2018-05-30
2#
感谢分享,感谢支持,欢迎关注我,资料持续更新中。有需要机械臂,电源,硬件电路设计,软件编程,开发板等各种定制的可以私聊我哦,相互学习,共同进步。
(0 )
-

- phoenix20111116
-
124 发帖361 回复1671 积分
- 私信他 +关注

发表回复

版
块
导
航
块
导
航
举报
请选择举报类别
- 广告垃圾
- 违规内容
- 恶意灌水
- 重复发帖
