




 楼主
楼主
2.模拟舵机:需要不断的发送目的地PWM信号,才能旋转到指定位置。例如:我现在让它旋转90度,我就需要不断的发送90度的PWM信号直到到达指定位置才能停止。
3.数字舵机:只需给一个目的地PWM信号,即可旋转到指定位置。例如:我现在让它旋转90度,我只需要发送一次90度的PWM信号,它就可以旋转到90度。
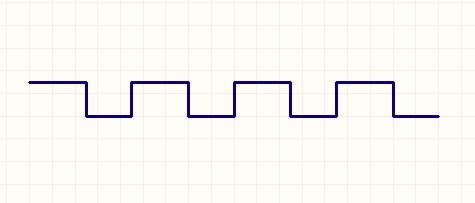
4.PWM信号:PWM(脉冲宽度调制)是利用微处理器的数字输出来对模拟电路进行控制的一种非常有效的技术。那么什么叫PWM信号呢,笔者就简单的谈一下自己的看法,我们都知道,我们所使用的单片机都是数字电路,它的I/O口只有两种状态,那就是高电平(1),低电平(0)。知道了这些之后,我们通过控制微处理器输出1-0-1-0-1-0-1-0……如此循环往复,就成为下图1所示的情况,这就是PWM信号。
5.占空比:高电平(或者低电平)占整个周期的时间就叫作占空比。
6.PWM频率:PWM频率是指每秒钟信号从高电平到低电平再到高电平的次数。
工作原理 理解以上的概念,对我们接下来的学习是非常有必要的,希望大家能好好掌握上面的概念。
我所使用的SG90舵机,如下图2所示

图2
接线方法:
红-------------------------VCC
棕色----------------------GND
橙色----------------------信号线
原理:舵机内部有一个基准电压,微处理器产生的PWM信号通过信号线进入舵机产生直流偏置电压,与舵机内部的基准电压作比较,获得电压差输出。电压差的正负输出到电机驱动芯片上,从而决定正反转。当舵机开始旋转的时候,舵机内部通过级联减速齿轮带动电位器旋转,使得电压差为零,电机停止转动。
重点:作为一个单片机编写者,具体的原理,我们不必要搞清楚,我们只需知道如何控制它即可,以下将讲解如何控制舵机运转。
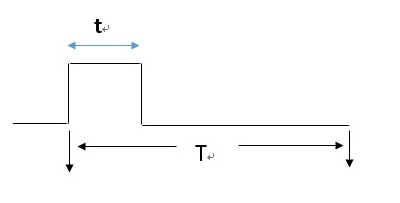
第一步:我们需要使用单片机产生周期为20ms,高电平t等于0.5ms-2.5ms之间的这样一个方波。定时器+中断产生这样的方波。
高电平在一个周期(20ms)的持续时间对应的舵机角度,如下图所示。
第二步:简单讲一下编程思想吧,我所使用的是方法是定时器+中断,定时器每0.5ms中断一次,需要中断40次才能达到20ms。我们此时需要一个全局变量来记录中断的次数,当中断达到40次时,全局变量重新清零。当中断次数小于a时,信号线输出高电平,否则输出零。此时a的值对应关系如下(1--0度,2--45度,3--90度,4--135度,5--180度)。
高电平t占整个周期T(20ms)的时间
舵机旋转的角度
0.5ms
0度
1ms
45度
1.5ms
90度
2ms
135度
2.5ms
180度
第三步:着重讲程序中一个语句的含义
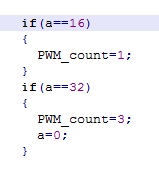
为什么此处要此处a==16,a==32,首先,这个值是我一步步测试出来的,如果你看见源程序的话,上面有详细的介绍,此处不再赘述。
我们知道SG90是一个模拟舵机,需要不断的给出信号才能到达指定的位置。到达这个位置并不是一蹴而就的,它需要时间,实际上面的a==16,相当于延时,这段时间刚好能够让舵机达到指定的位置,然后在接收下一个回摆程序。a==32,是因为我需要让它来回摆动的时间对称,所以才用a==32的。有兴趣的可以改变a的值,观察一下具体的情况。
程序此处都不贴出来,时间紧迫,我会放在附件中,有黑币的直接下载,没有的,留下邮箱
单片机源程序如下:
 回复
回复
 举报
举报
-

- xiaomiking
-
1147 发帖6357 回复18609 积分
- 私信他 +关注


-

- 0000000000000000
-
1888 发帖7917 回复34980 积分
- 私信他 +关注




块
导
航
举报
请选择举报类别
- 广告垃圾
- 违规内容
- 恶意灌水
- 重复发帖
